对齐图片(投影后)
添加图片
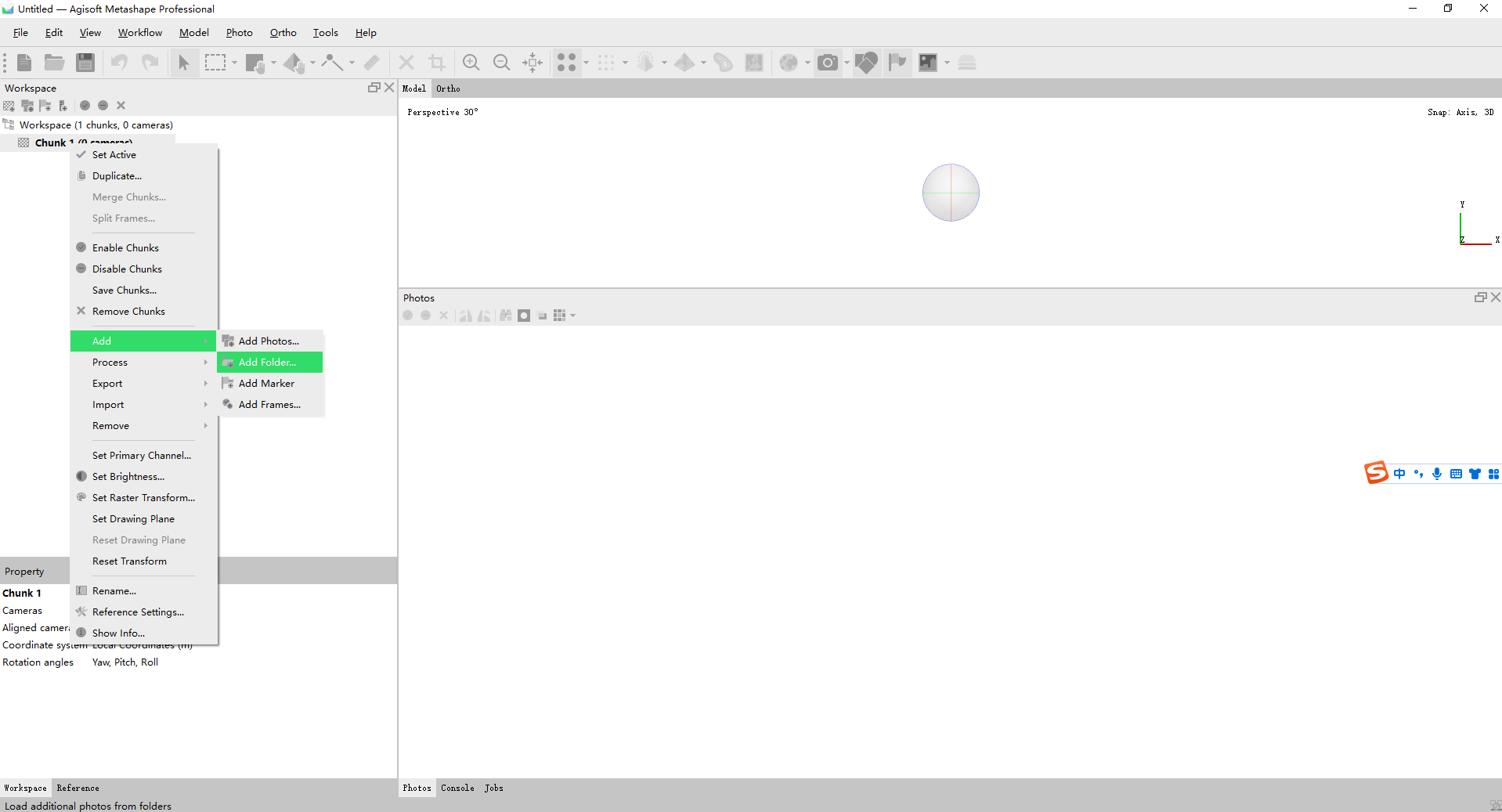
全景图片一张可以投影为若干张普通图片,在PhotoScan中可以将一张全景图片所投影出的图片设置为一个组,对其加以约束,会使得图片对齐效果更好
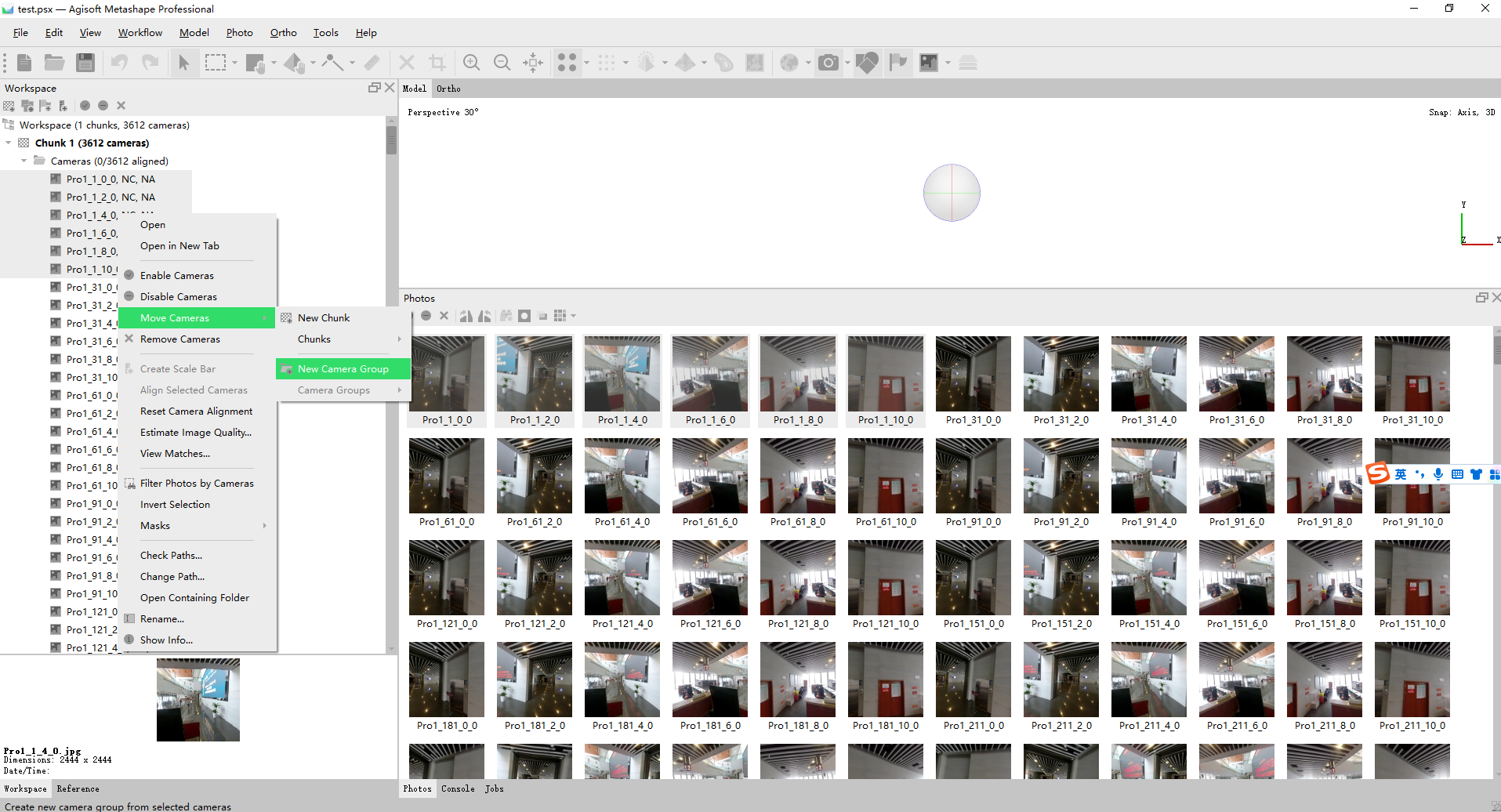
图片分组
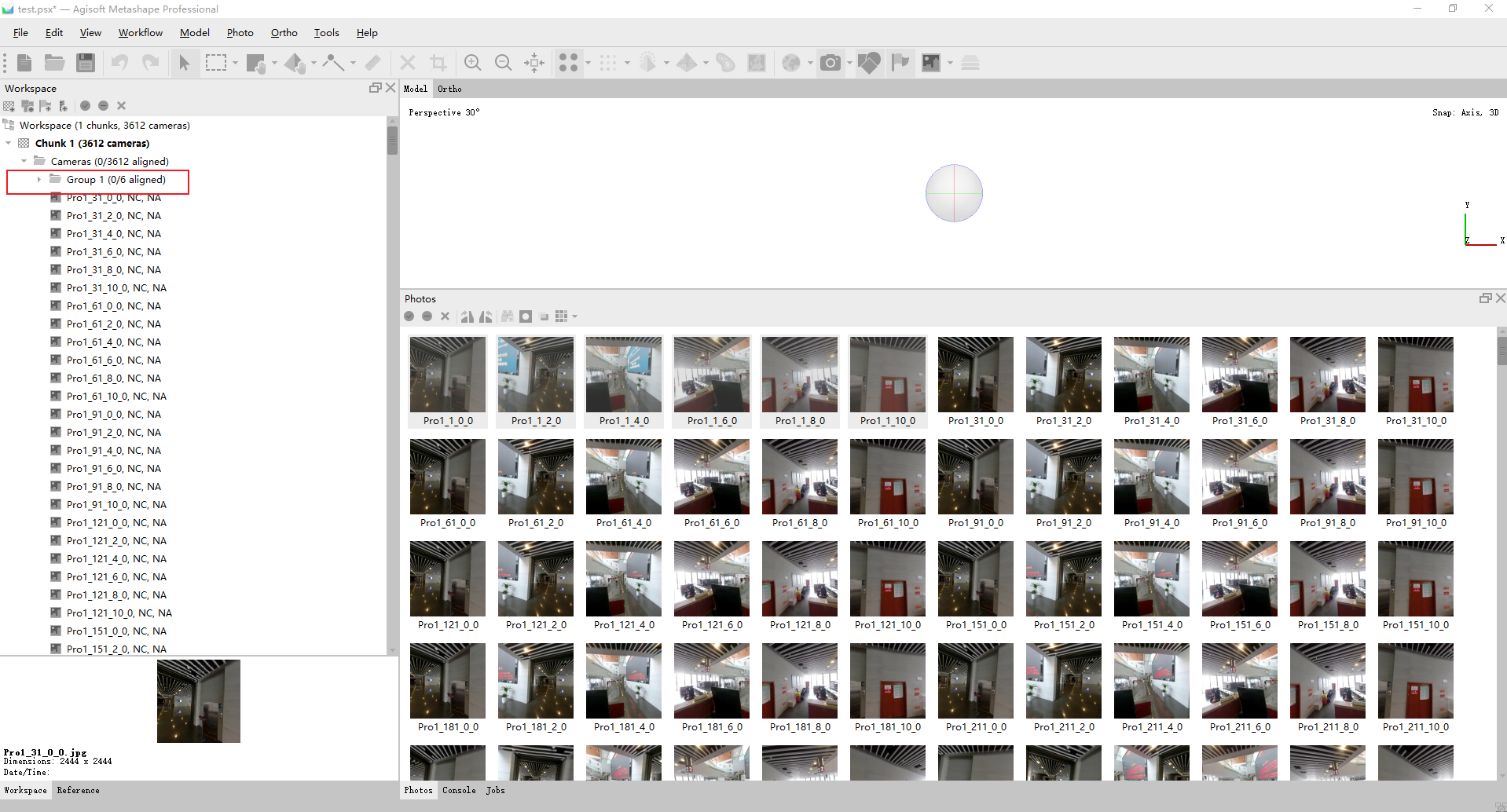
- 首先选中一组图片,将其添加到一个图片组中
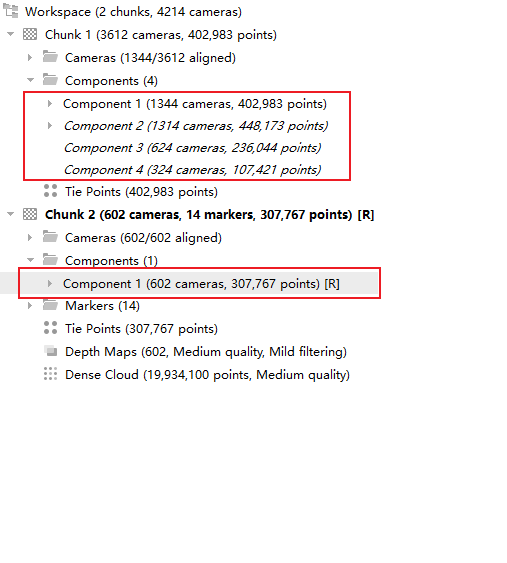
- 保存后项目文件夹下会有一下红线圈出的内容
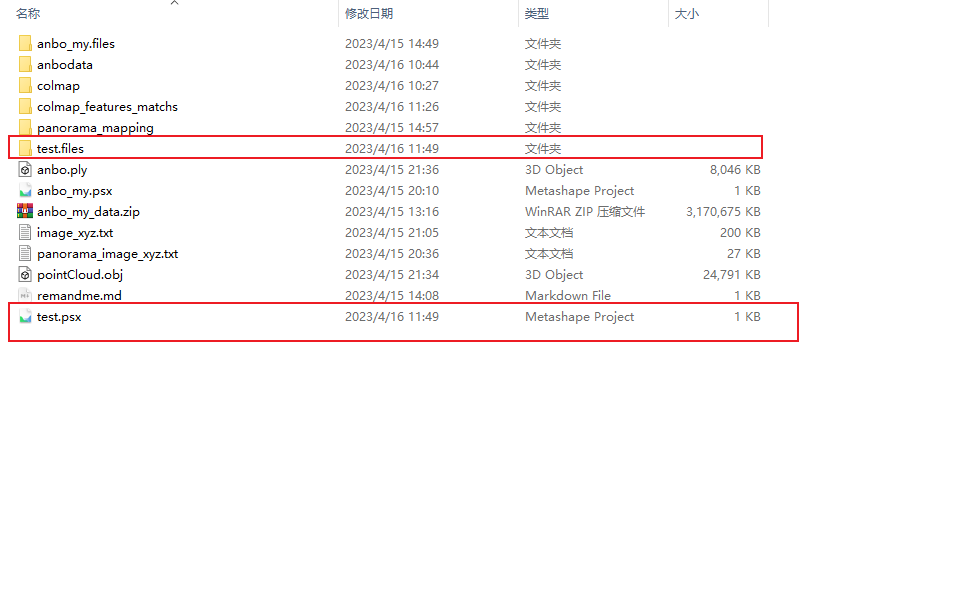
进入对应的chunk文件夹下
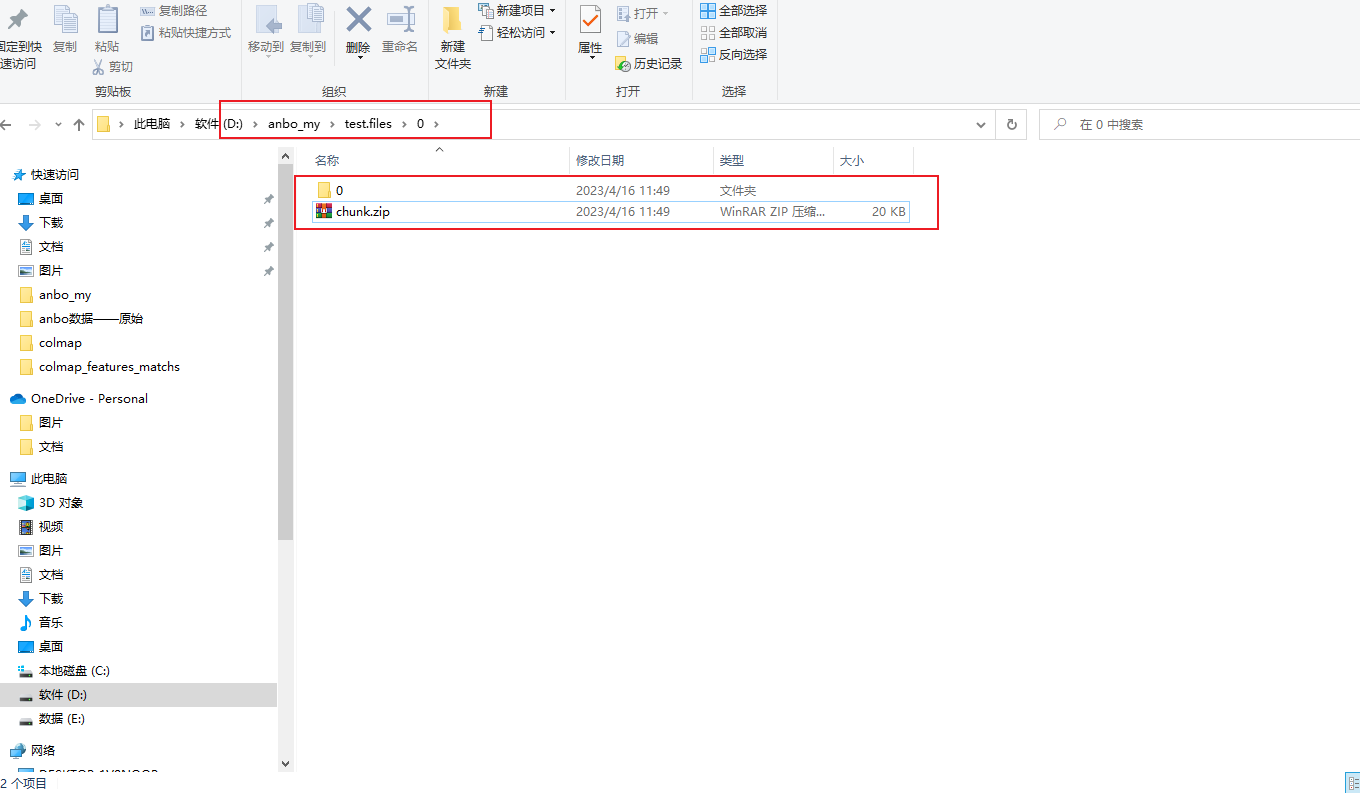
- 解压chunk.zip得到doc.xml文件
doc.xml内容如图所示,其中包含了我们预设的group,我们只需要将其他camera也组织成group格式就可以分组成功
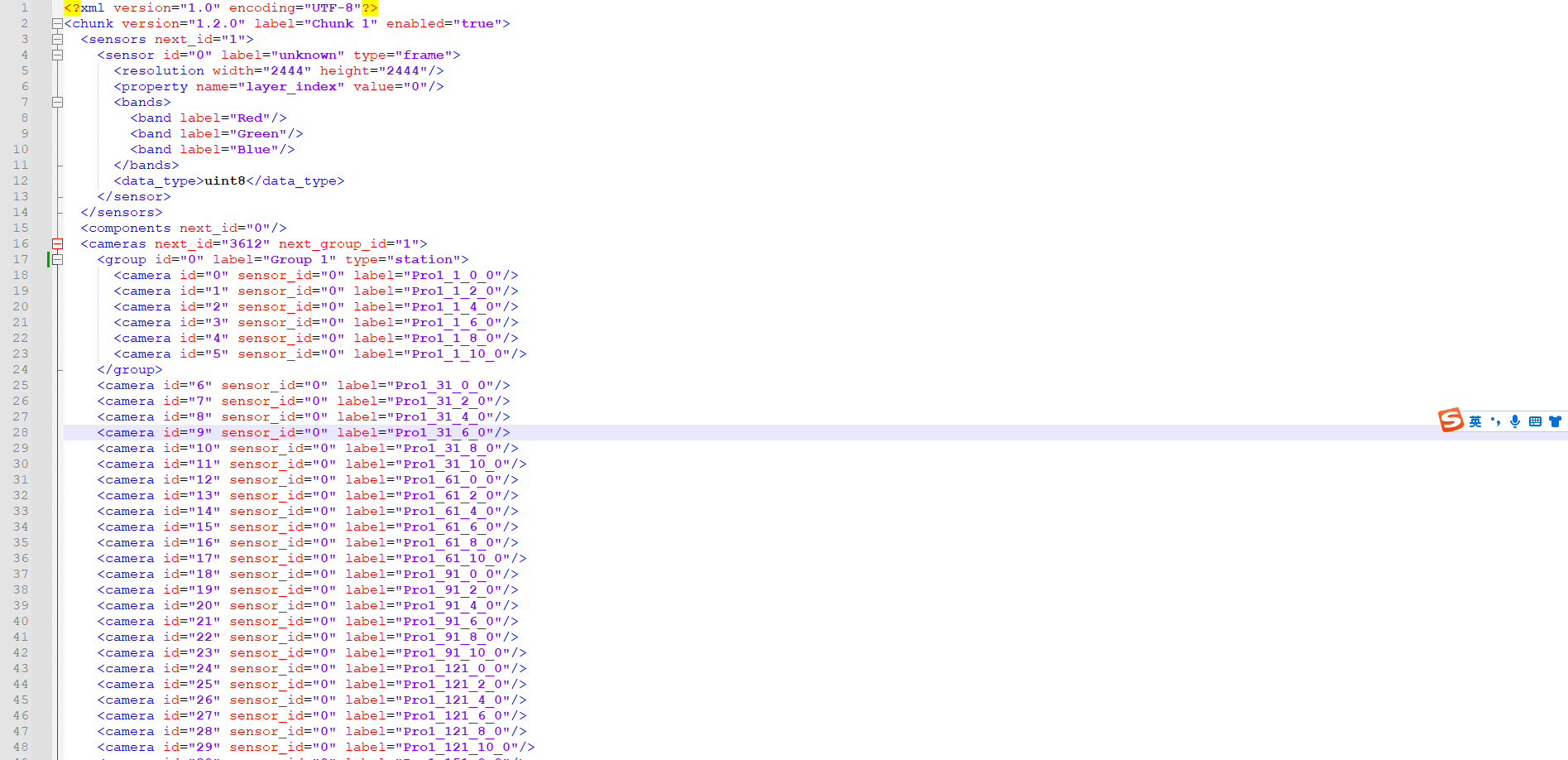
- 现将剩余的camera组织为group格式,并输出到txt中,将txt中的结果复制到doc.xml中替换原来的内容
1 | def photoScanNewChunk(): |
注意更改id、label和type的值

- 重新打开项目文件
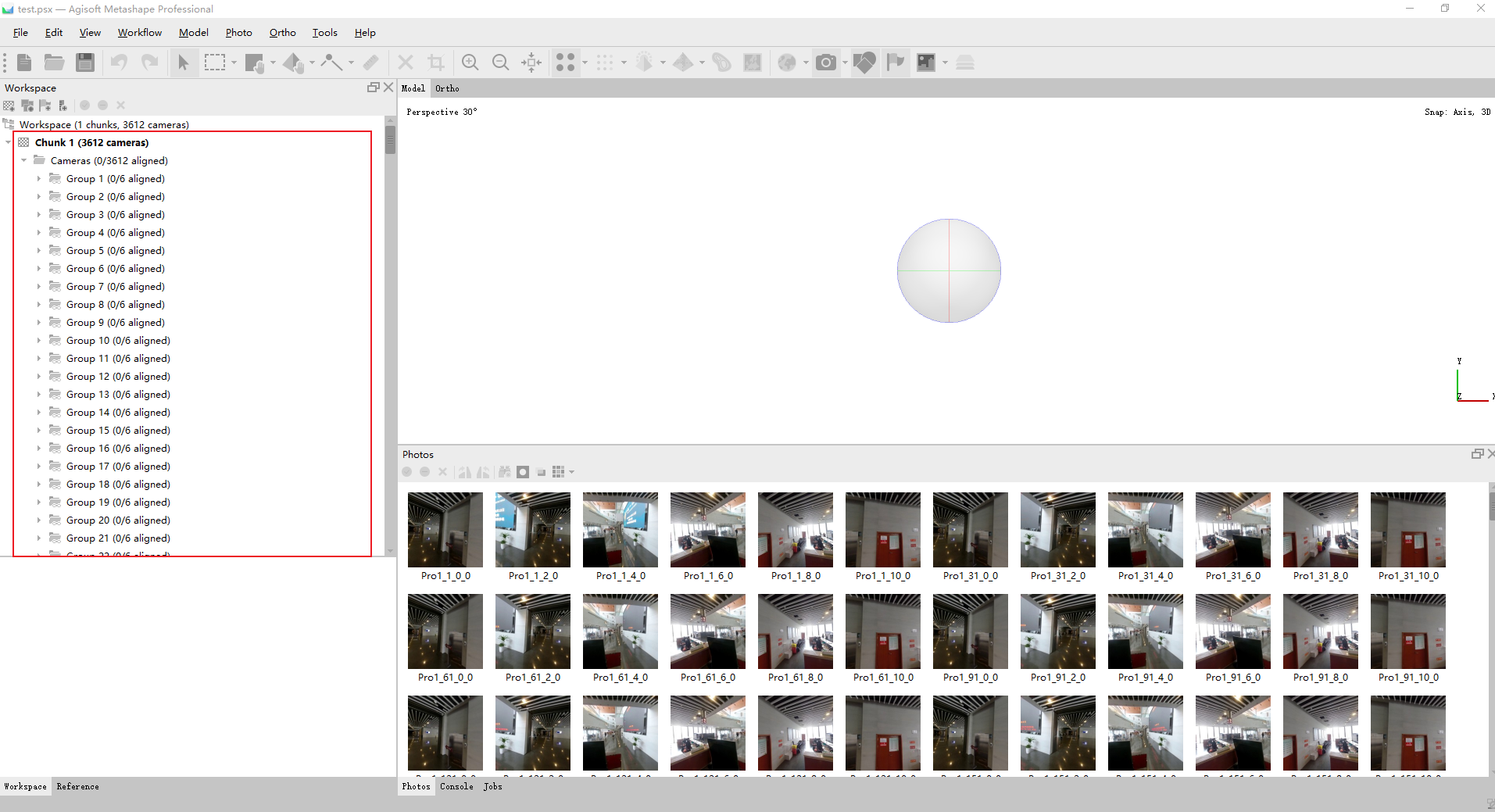
对齐图片
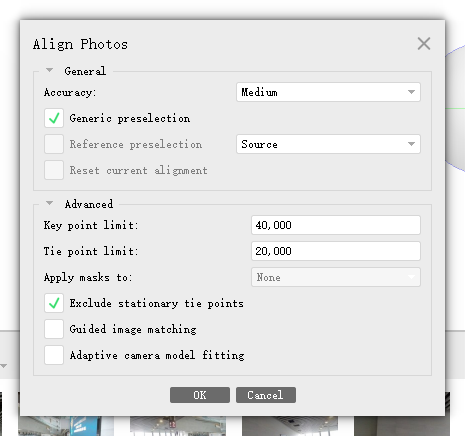
Workflow→Align Photos
根据需求更改精度之类的东西
如果对齐成功,就会像下面一样只有一个component,而如果对齐失败就会出现多个component这时就需要其他方法去改进优化
对齐图片(全景图片直接处理)
除了按上述将投影后的图片进行对齐及后续处理,还可以直接使用全景图片进行操作
全景图片数量更少(一张全景图片会投影为若干张普通图片),因此处理速率更快
出现多个component的概率更小
但可能也会出现其他问题
由于是全景图片,因此不存在分group的情况,当然也可以将比较靠近的若干图片分为一组
- 注意导入图片后要有一个步骤告诉软件我们正在使用全景图片
- Tools→Camera Calibration
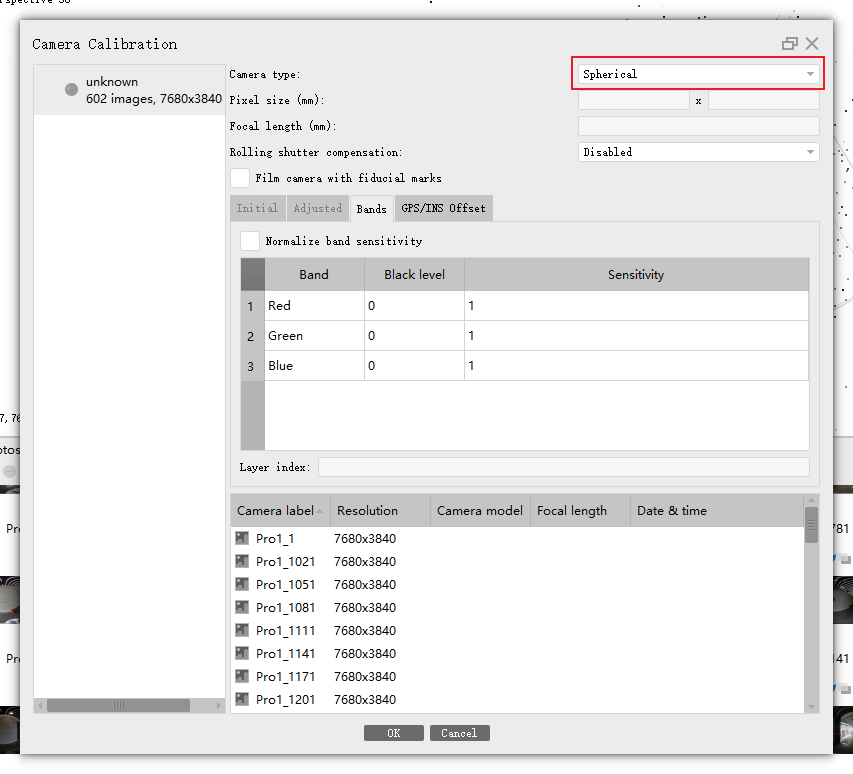
- 其余步骤与之前相似,得到align后的结果