仪器安装
无人机安装+RTK安装
航线规划
按照公司给的文件计算飞速等设置(要求其中一条航线包含灰布)
参数设置
自动曝光+白帧+黑帧
***自动曝光:***将飞机抬起来对着灰布,要求迎着太阳,摄像头拍的灰布区域不会被影子挡住,点击自动曝光
***白帧:***将飞机抬起来对着灰布,要求迎着太阳,摄像头拍的灰布区域不会被影子挡住,点击白帧
***黑帧:***将飞机放在地面上,盖着镜头盖,点击黑帧
飞行
起飞+绕8字+按航线飞行+(过灰布)
如果航线不过灰布的话需要手动飞一条航线过灰布
无人机安装+RTK安装
按照公司给的文件计算飞速等设置(要求其中一条航线包含灰布)
自动曝光+白帧+黑帧
***自动曝光:***将飞机抬起来对着灰布,要求迎着太阳,摄像头拍的灰布区域不会被影子挡住,点击自动曝光
***白帧:***将飞机抬起来对着灰布,要求迎着太阳,摄像头拍的灰布区域不会被影子挡住,点击白帧
***黑帧:***将飞机放在地面上,盖着镜头盖,点击黑帧
起飞+绕8字+按航线飞行+(过灰布)
如果航线不过灰布的话需要手动飞一条航线过灰布
ar_app文件夹:
***数据与输出文件夹:***建议按以下路径放置,可以更改

其中:
路径下有两个文件夹:
里面有若干定位所需要的文件,不可更改
本机电脑IP地址,服务发布的位置
数量可以设置为100,可以根据定位效果调整,这个对定位效率影响较小
这个对初始化定位速率影响较大,数量越多,定位精度越高,但定位效率越低
这个对导航定位数量影响较大,如上所述,可以根据精度和定位效率要求进行更改,默认为10
1 | wx.uploadFile({ |
1 | import json |
1 | { |
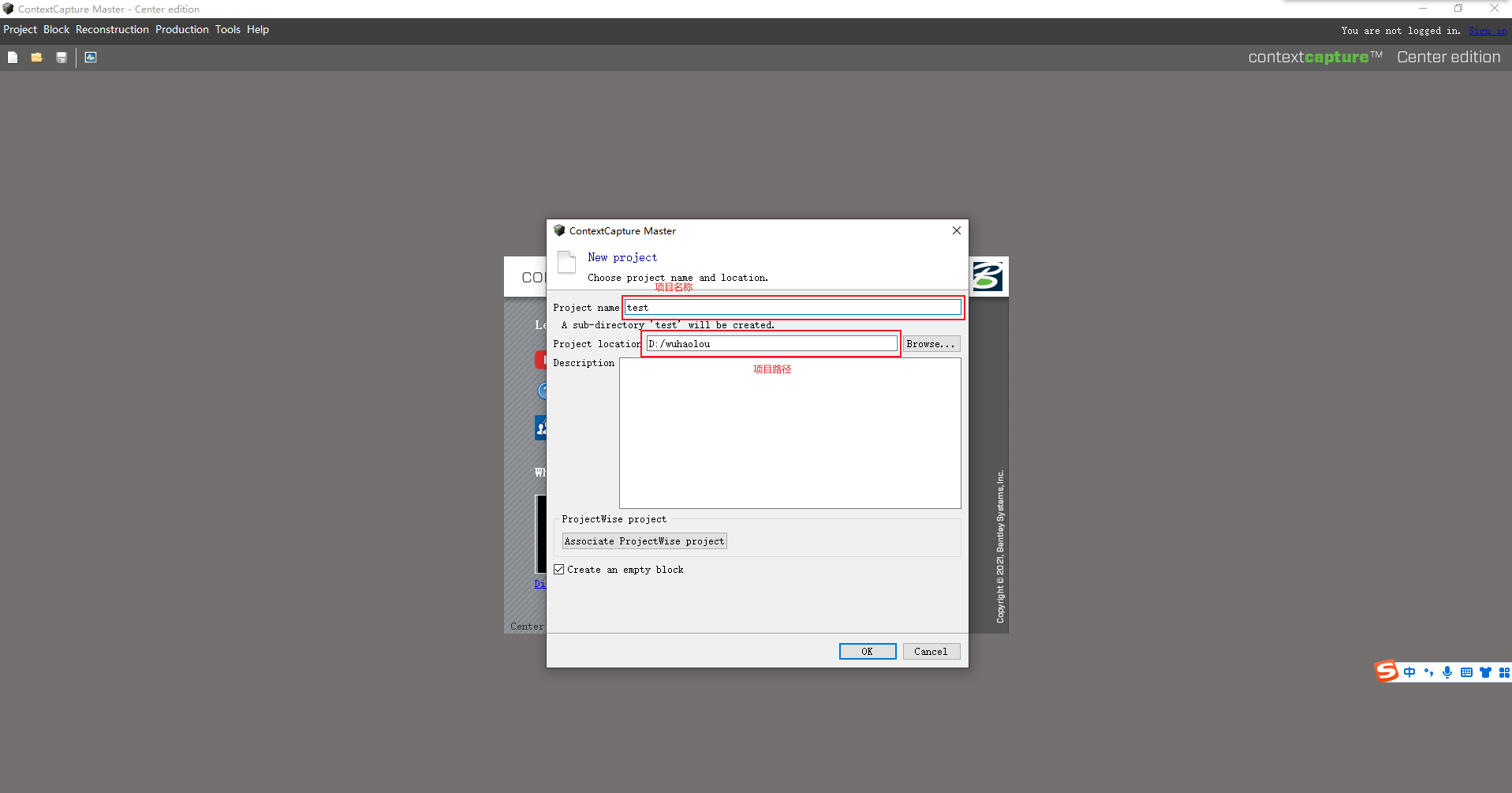
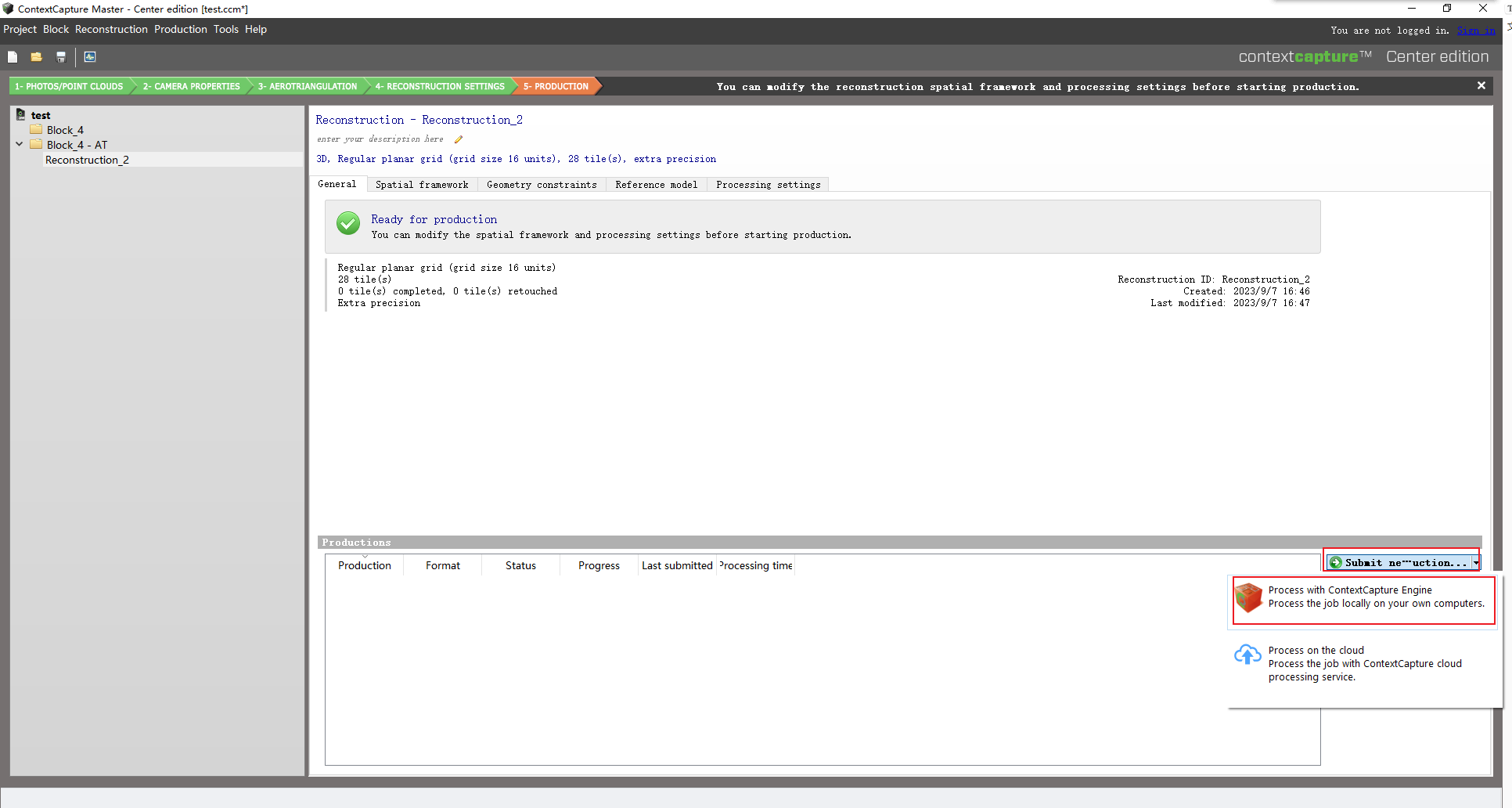
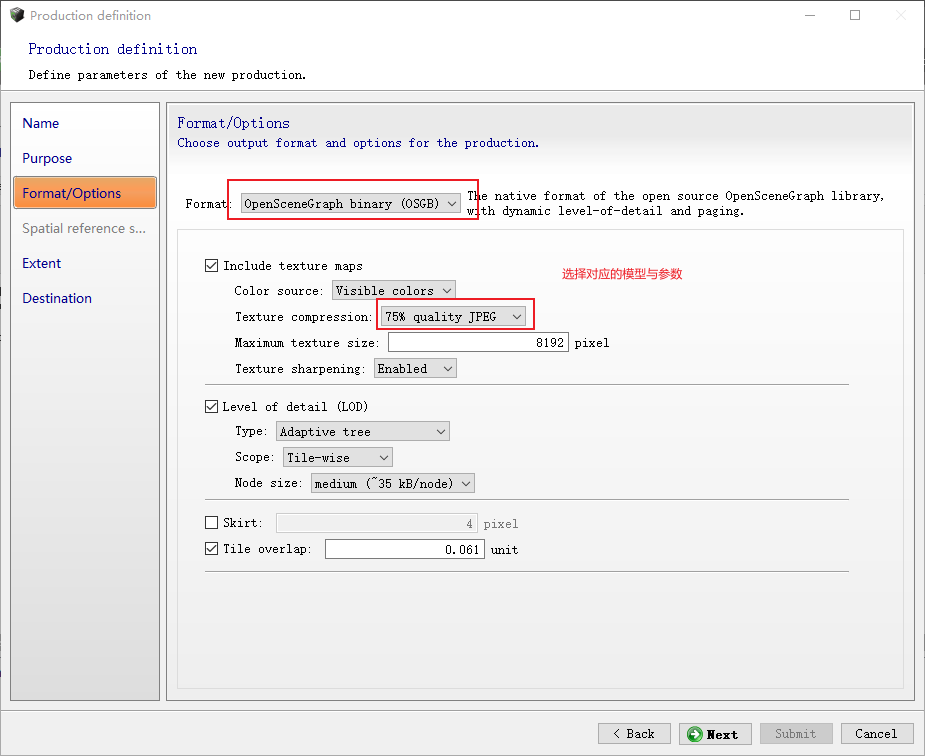
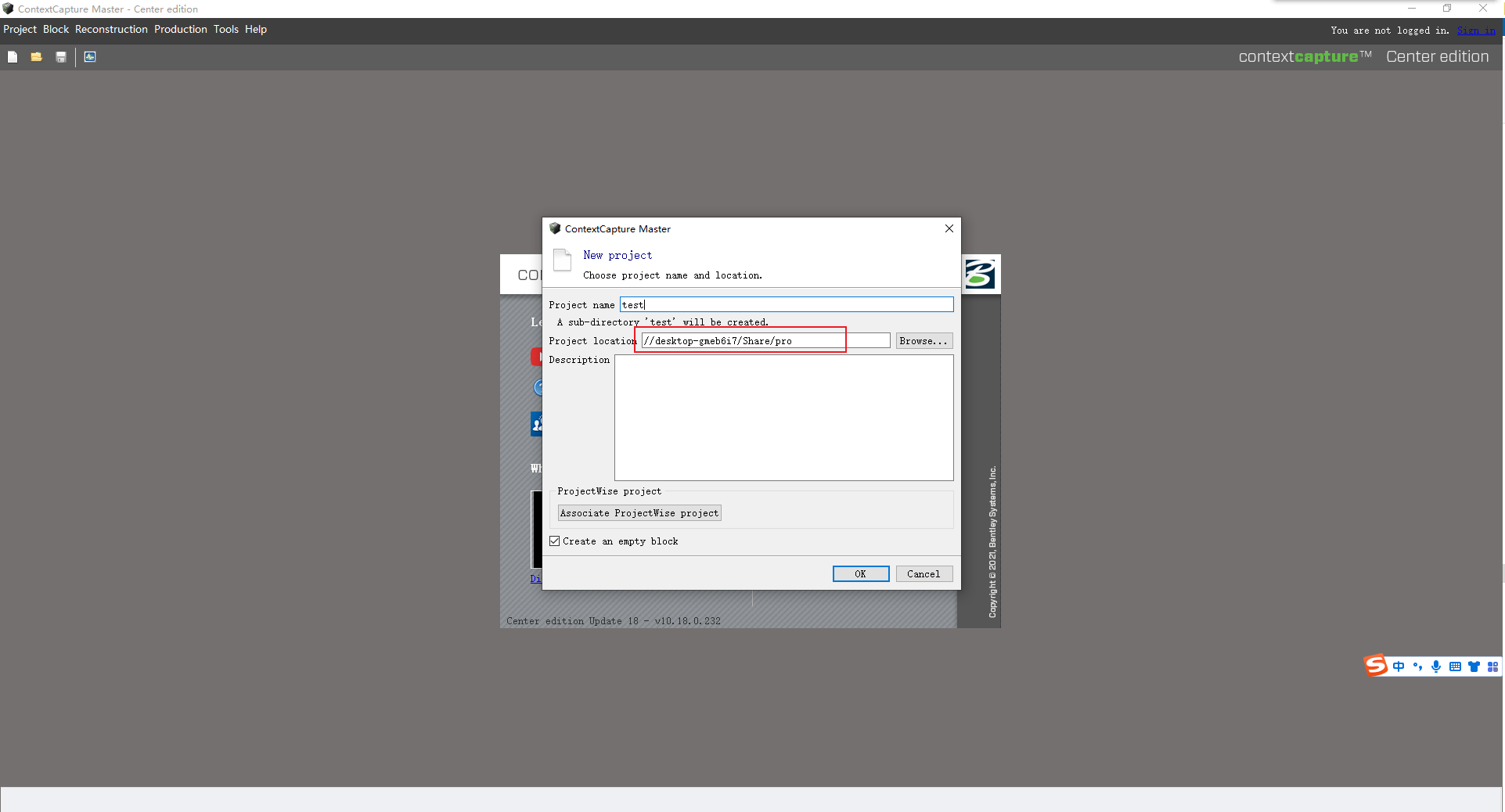
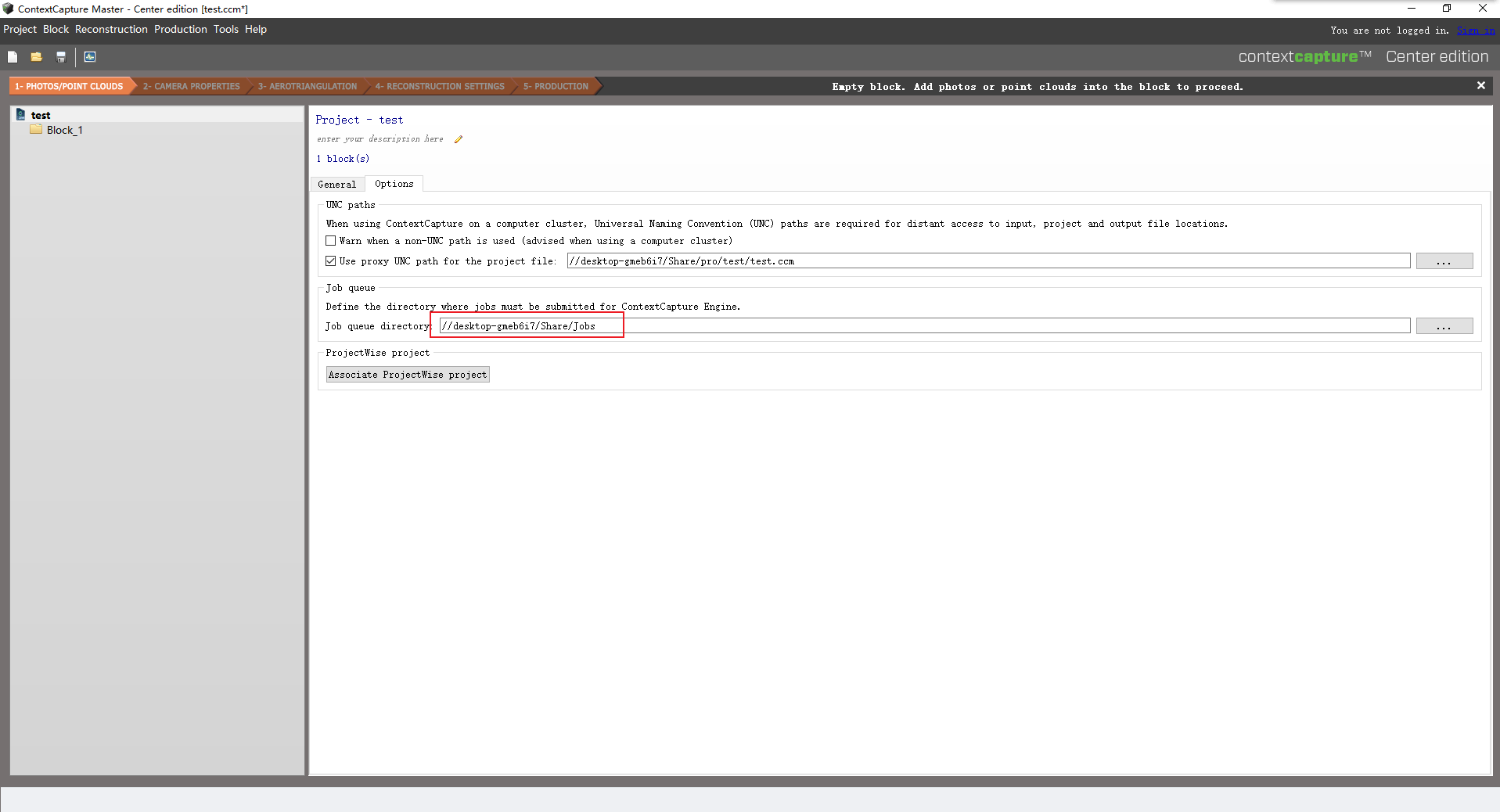
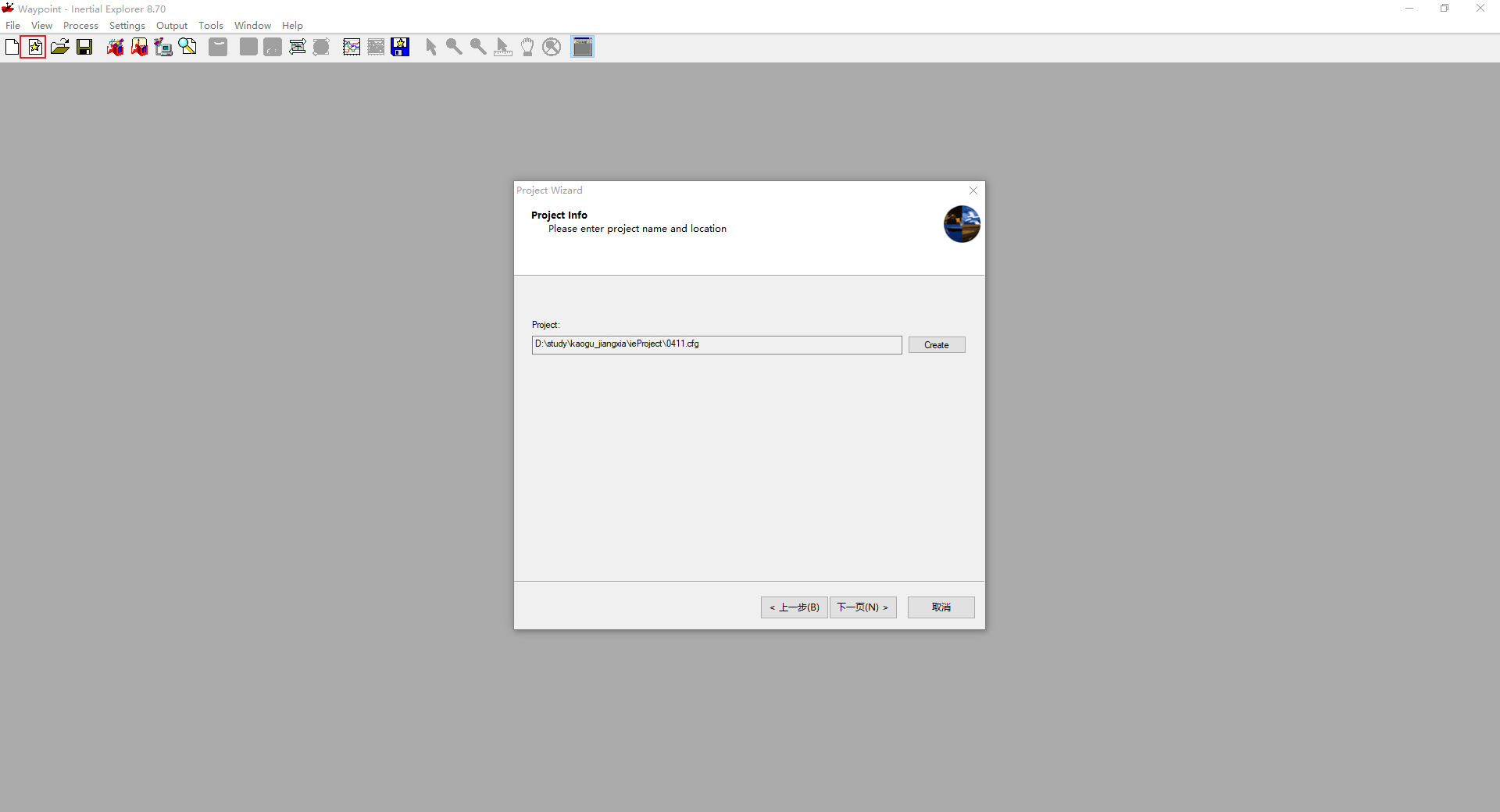
新建项目:
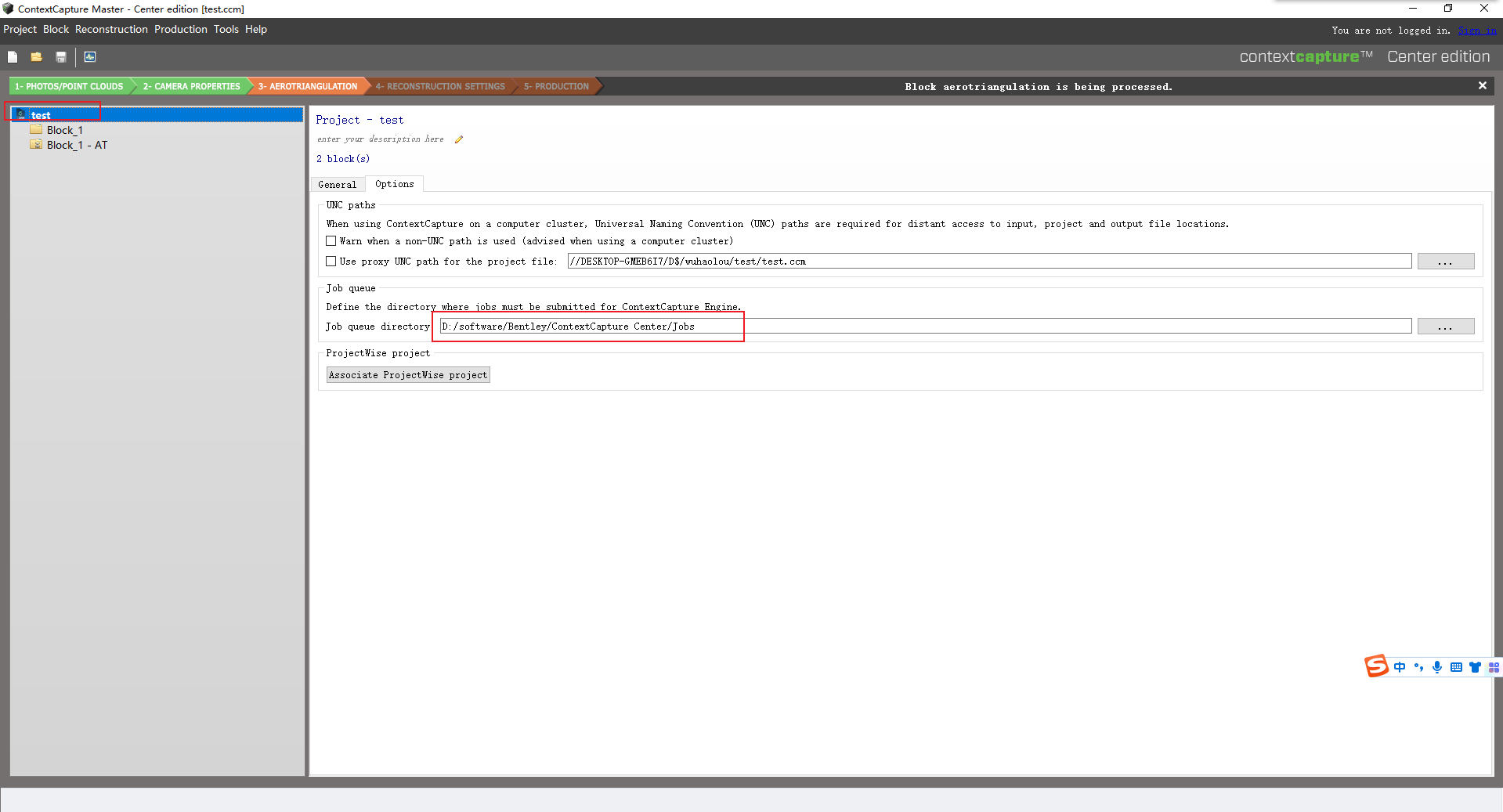
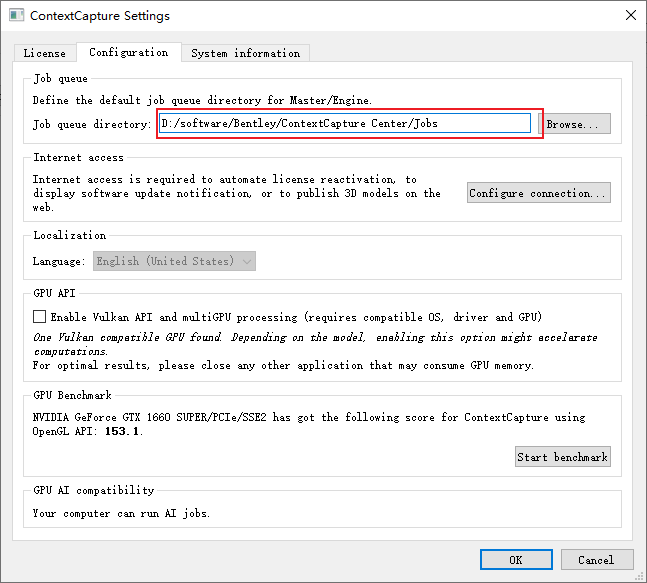
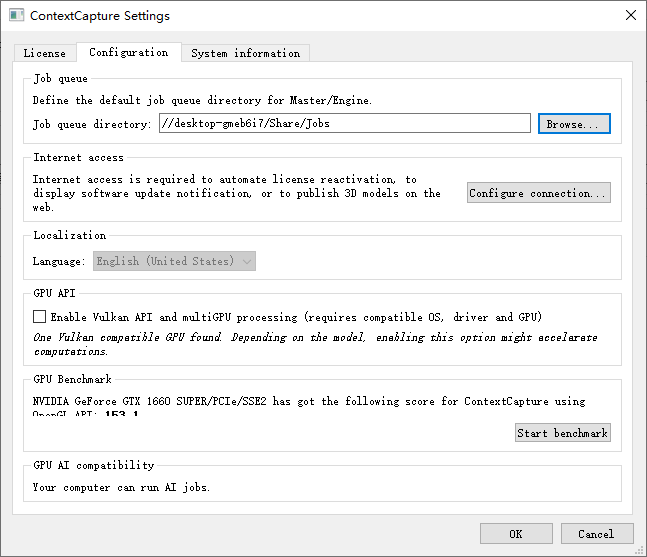
***引擎设置:***确保项目的jobs路径和引擎监听的jobs路径相同
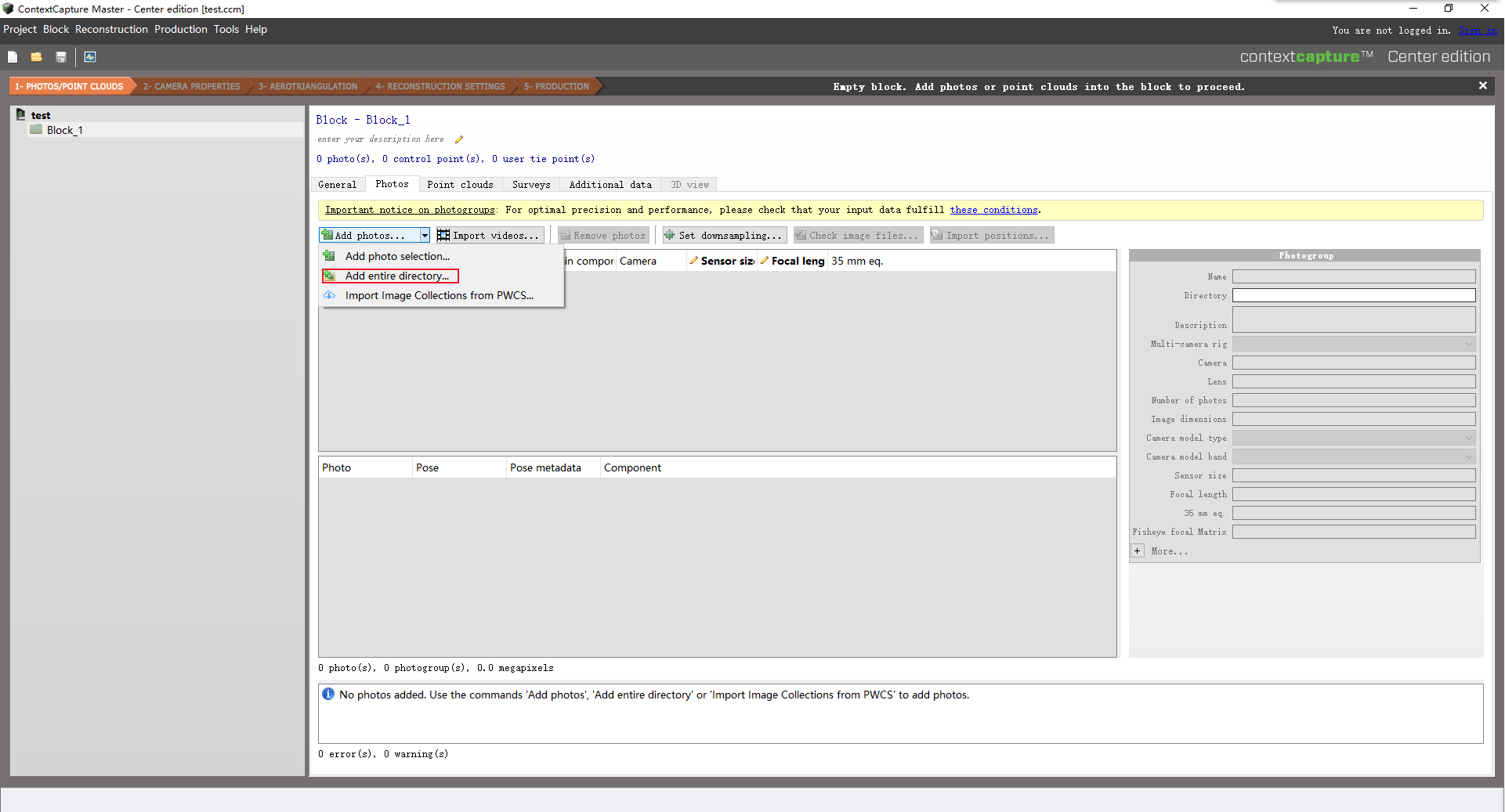
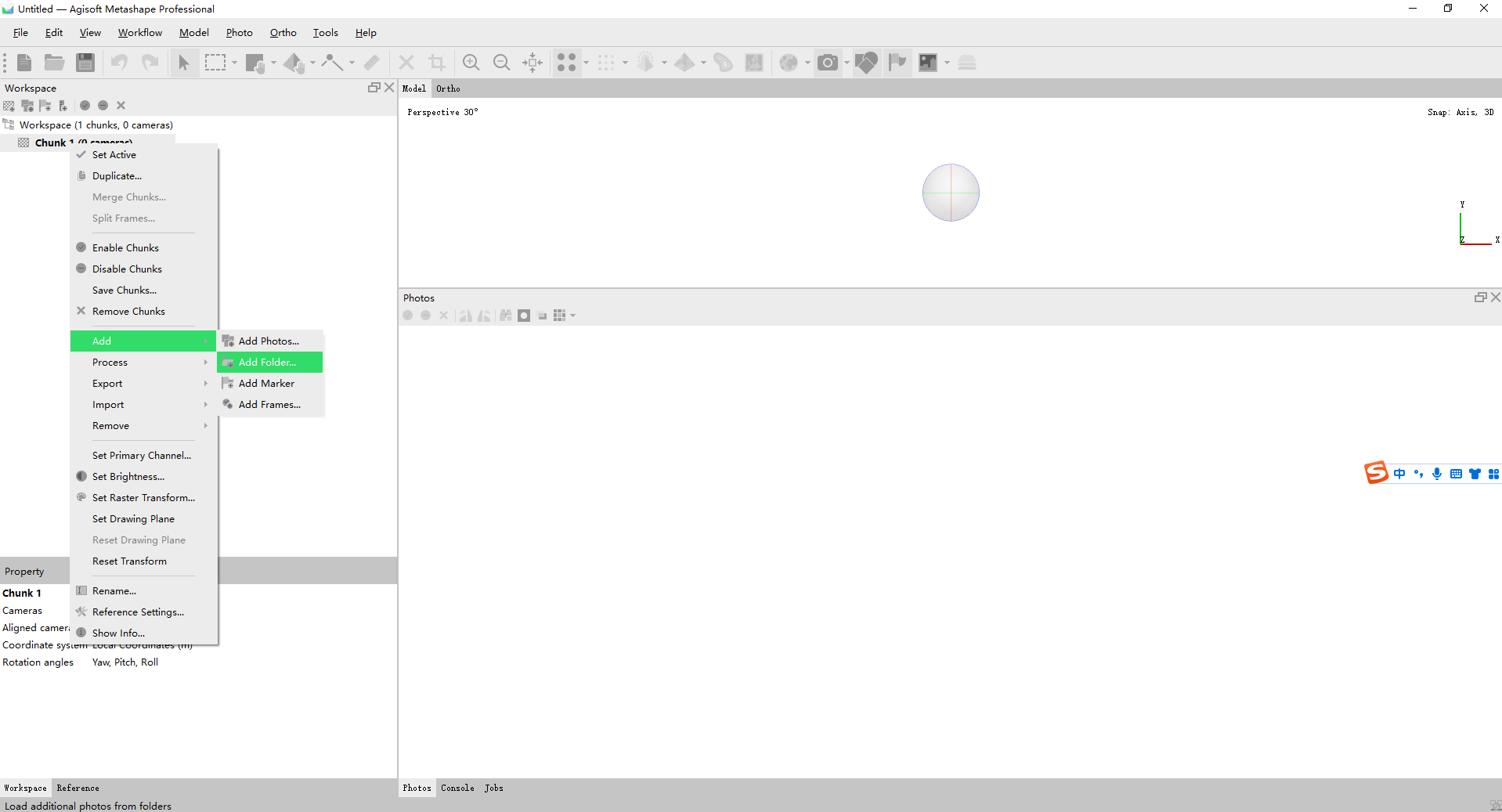
导入图片:
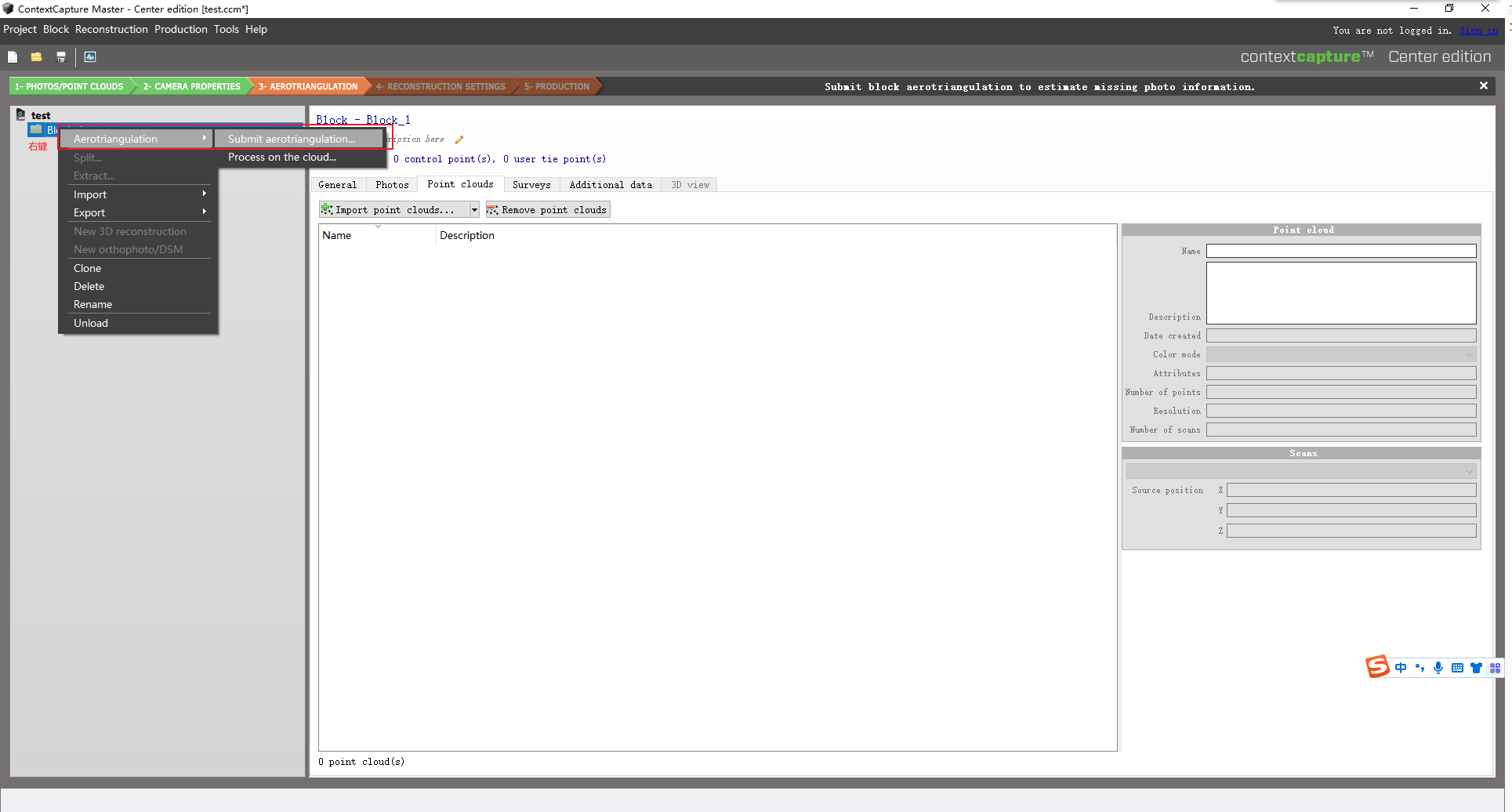
***空三:***block名上右键
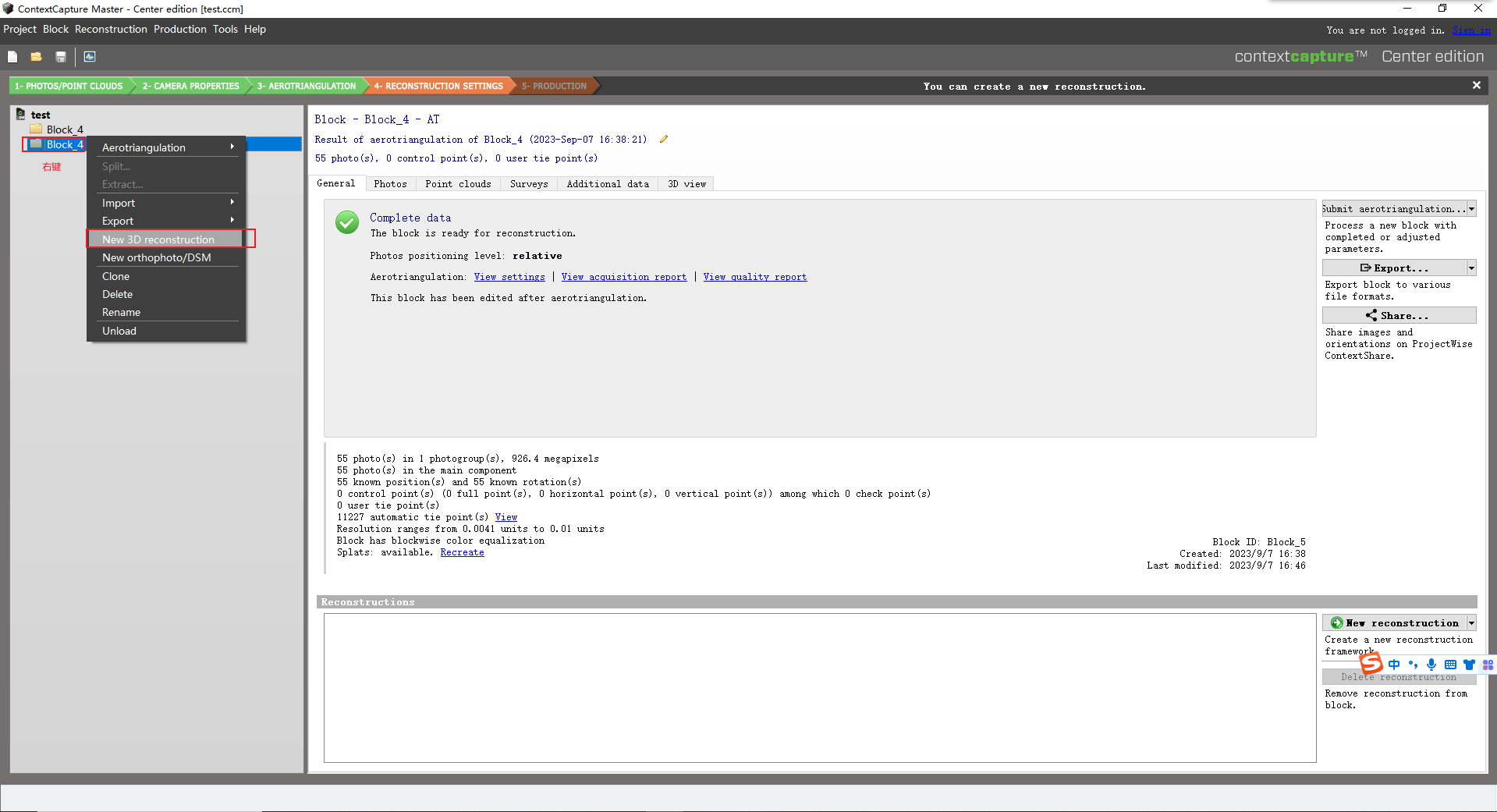
***重建:***空三后的block上右键
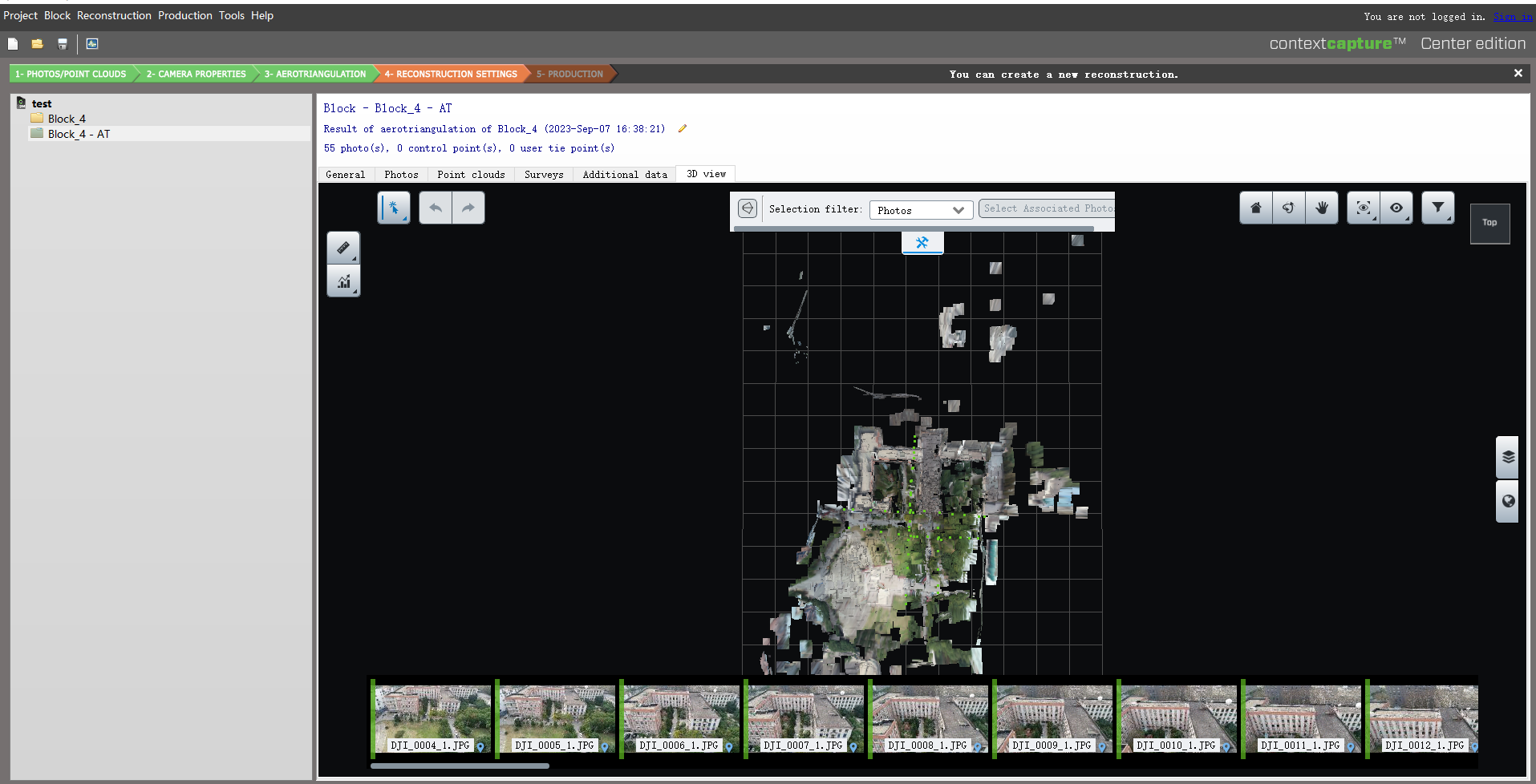
注意导入的xml文件中图片的路径要和导入图片的路径一样,也就是需要更改一下这个路径,在3D view里去看一下是否图片可以找到
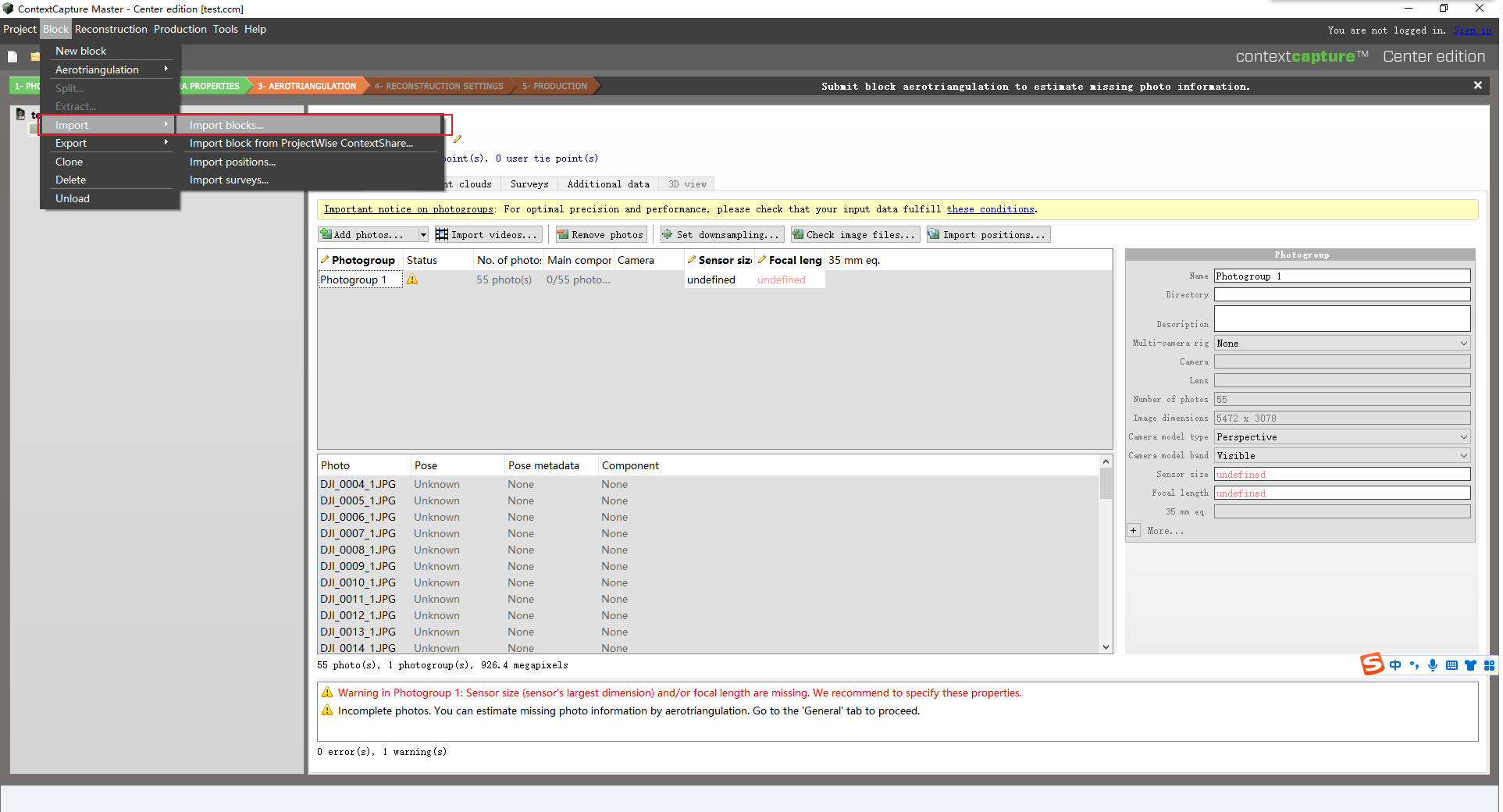
***集群三个部分:***Master机器+文件存储机器+工作机器(引擎)
项目路径要为网络路径
引擎设置:
其余和非集群类似
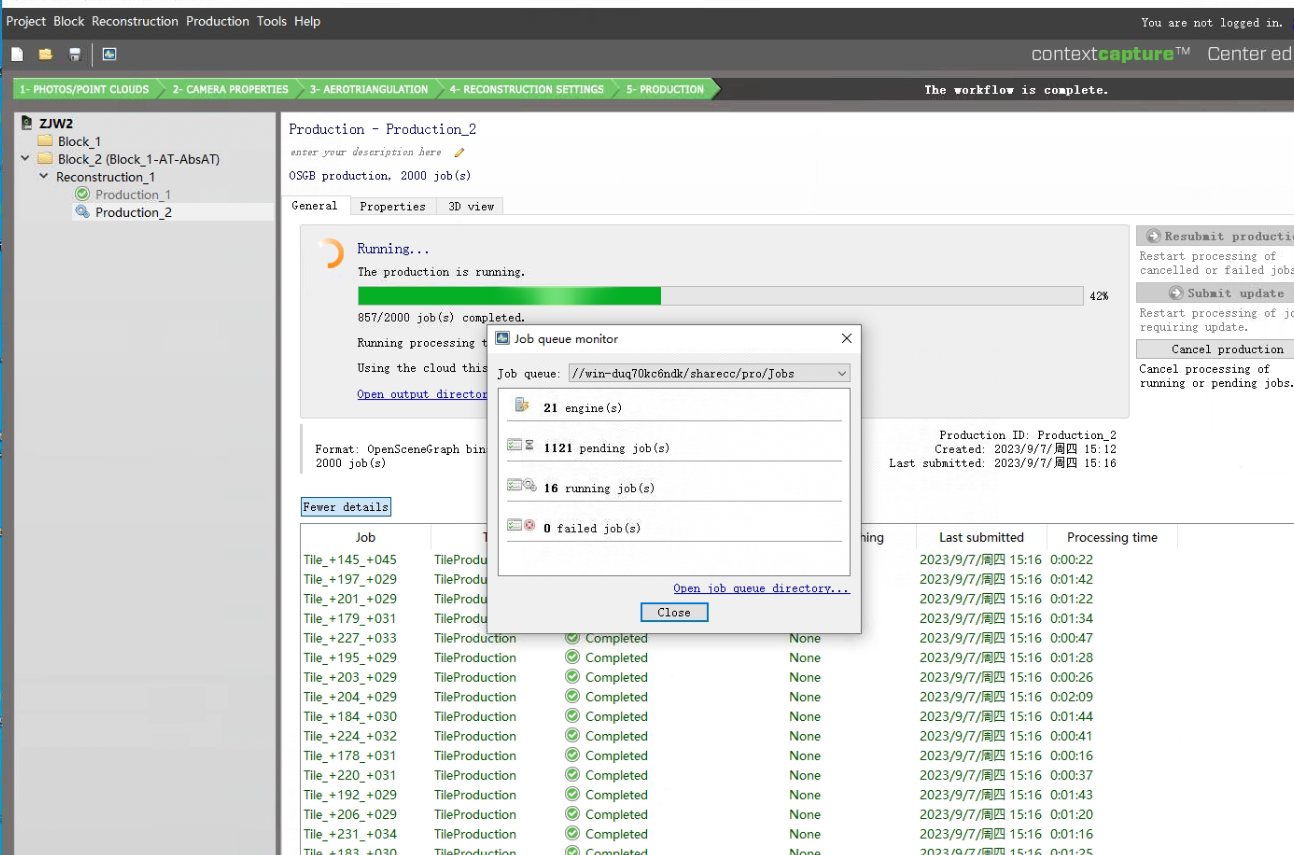
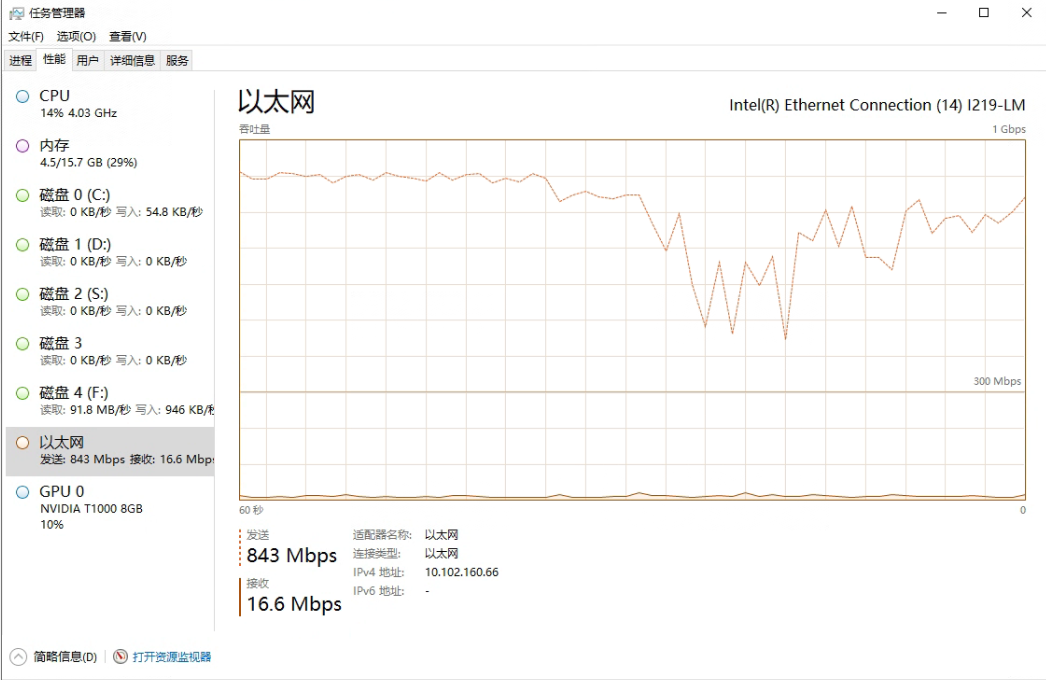
集群所有的机器都会在文件存储机器上面读写,因此有一定的带宽限制,开的集群机器数目不能太多,可以适当超过带宽限制一点点
分tiles提交,一次只提交一部分tiles
1 | cv2.error: OpenCV(4.2.0) C:\projects\opencv-python\opencv\modules\highgui\src\window.cpp:651: error: (-2:Unspecified error) The function is not implemented. |
***解决办法:***降低python版本为3.7
***注意:***python版本使用3.7的,要不然opencv会出错,什么原因不知道
1 | python demo/topdown_demo_with_mmdet.py demo/mmdetection_cfg/cascade_rcnn_x101_64x4d_fpn_1class.py cascade_rcnn_x101_64x4d_fpn_20e_onehand10k-dac19597_20201030.pth configs/hand_2d_keypoint/topdown_heatmap/onehand10k/td-hm_hrnetv2-w18_8xb64-210e_onehand10k-256x256.py hrnetv2_w18_onehand10k_256x256-30bc9c6b_20210330.pth --input tests/data/onehand10k/9.jpg --show --draw-heatmap |
梯度下降
1 | import tensorflow as tf |
1 | import tensorflow as tf |
所有的深度学习都包含上面几个步骤
因此,tensorflow将上面的固定步骤写在同一的接口中方便使用
1 | import tensorflow as tf |
***过拟合:***训练精度很高,测试精度不够(可能)
***欠拟合:***训练精度不够,测试精度也不够(可能)——模型复杂度不够
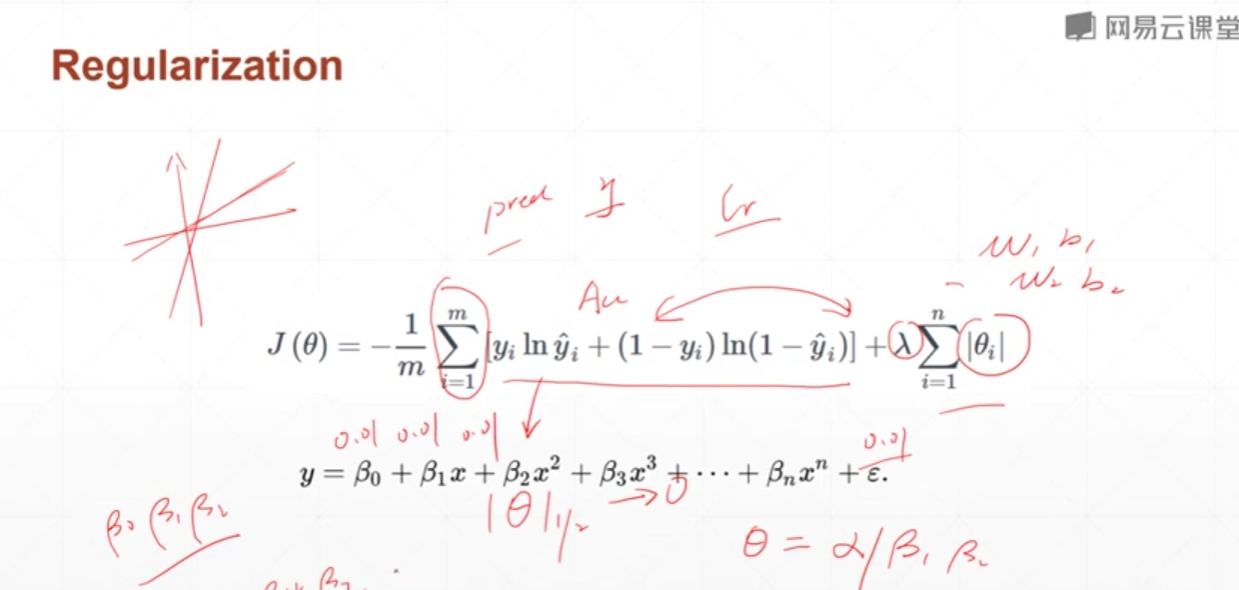
前面是误差,后面是参数的范式,参数的一范式越小说明参数越接近于0,那么拟合出来的模型就越平滑,出现过拟合的可能性就越小
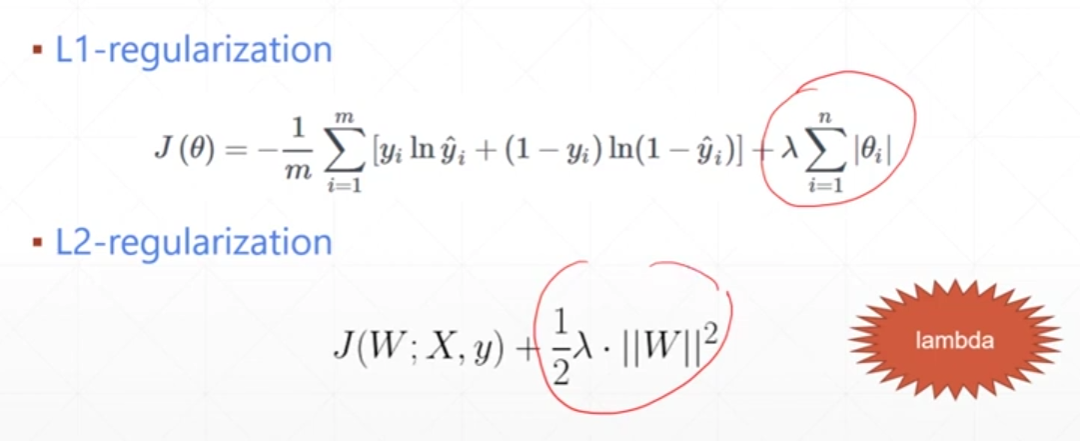
两张regularization方式,分别是一范数二范数
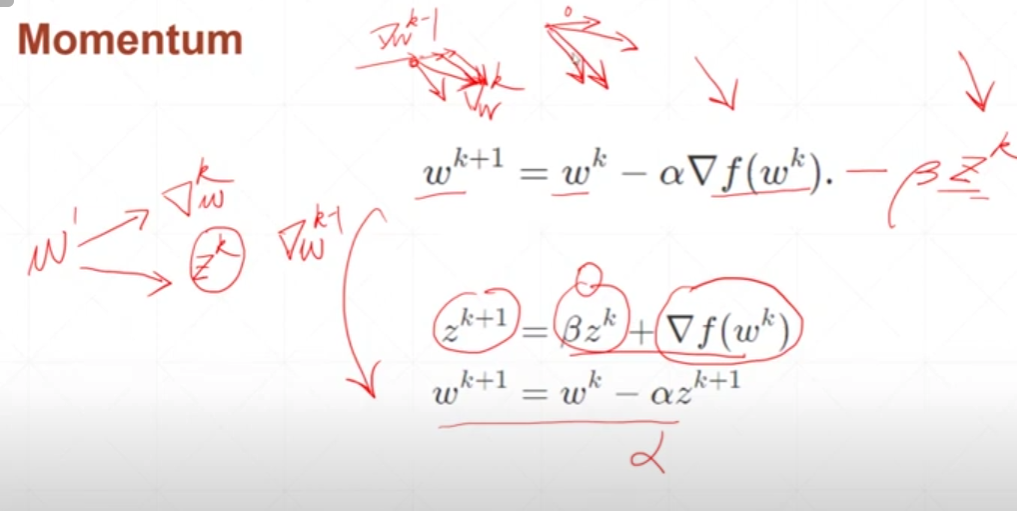
动量设置,参数更改的不仅仅由当前梯度的影像,还与上一次梯度的方向有关
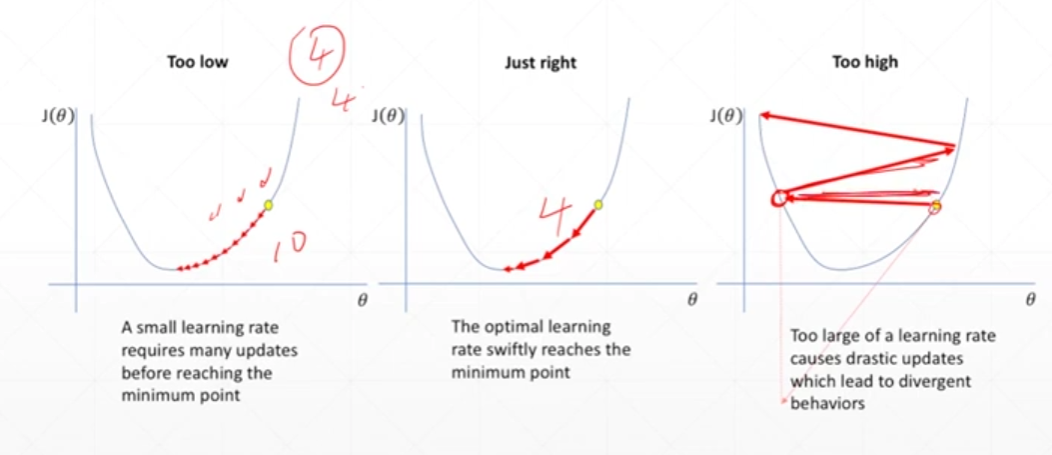
学习率一般刚开始比较大,后续慢慢变小,前期学习率大变化快,后续会较慢
如果出现了训练精度还在提高,测试精度不提高了,说明已经过拟合,可以停止训练
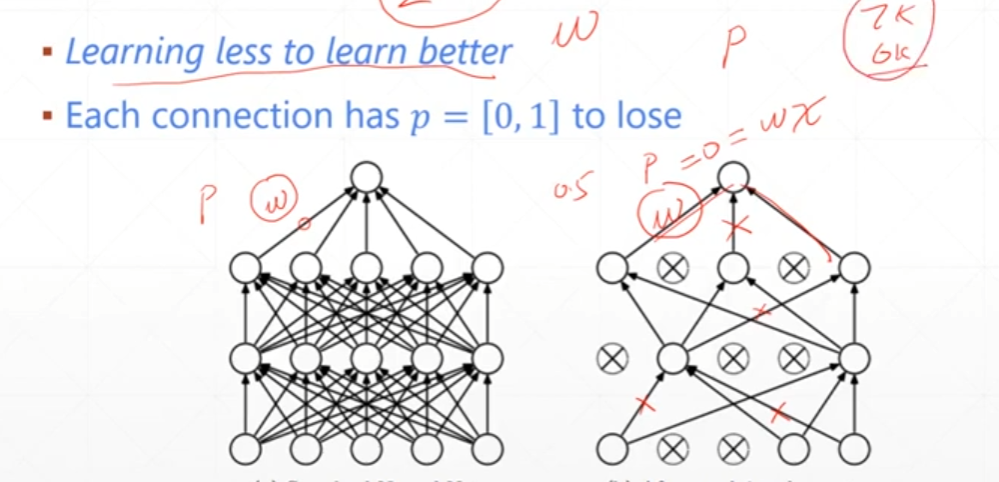
每一次训练都有一些连线可能中断
tensorflow和pytorch的dropout参数是相反的
dropout在做test时不能使用——要手动取消
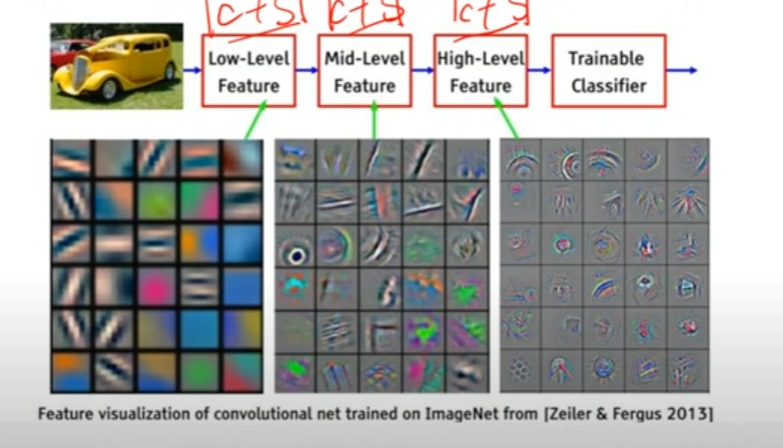
为什么要卷积?不使用简单的Dense层?
视野?滑动窗口?这个窗口是卷积核?cv里面锐化模糊边缘提取的卷积核
卷积核的个数,也就是con2d中的两个参数:
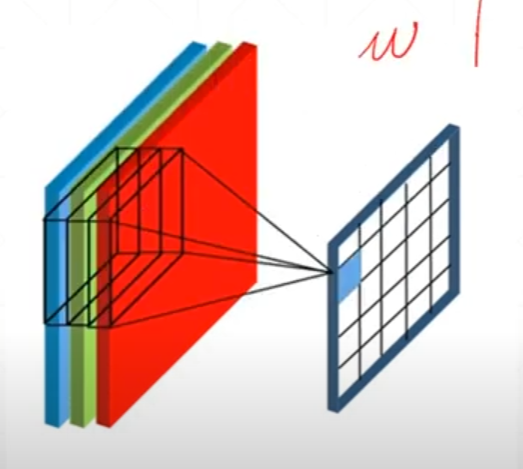
[c, 3, 3]一个卷积核可以将一张图片卷积到一个channels为1的新层次,c为图片的通道数
如图,这个[3, 3, 3]依次对三个通道做乘法,然后将结果加起来得到一个一通道的数据,这个一通道的数据代表着原图像在某一层次上的特征
有时候我们需要更多的特征,这时候就需要[N, c, 3, 3]这样N个卷积来提取特征,就会得到N个通道的特征
如下面的(64, 3)其中的64就是上面的N代表着64个通道的特征,3是卷积核的大小,也就是[c, 3, 3]中的3,c会默认与图片的通道数相同,所以不需要额外设置
1 | conv1 = Conv2D(64, 3, activation='relu', padding='same')(inputs) |
不同的程度可以获取到不同层级的特征
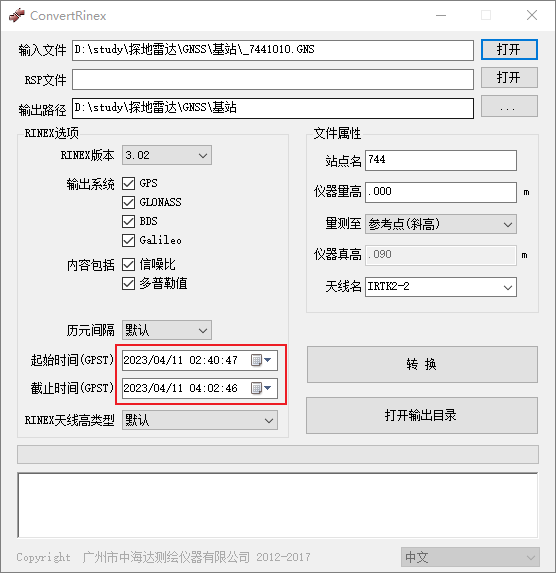
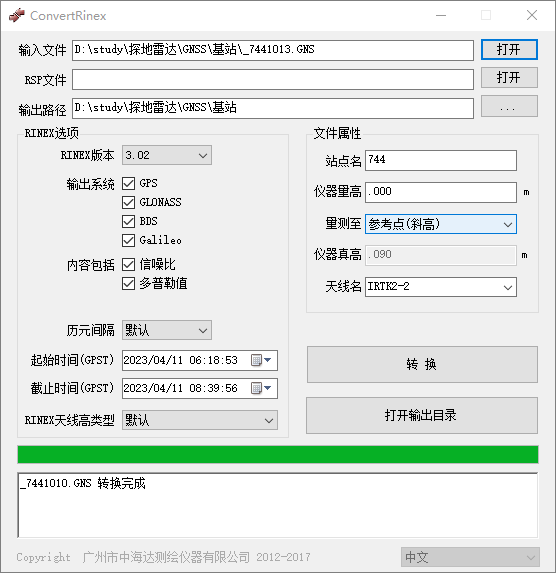
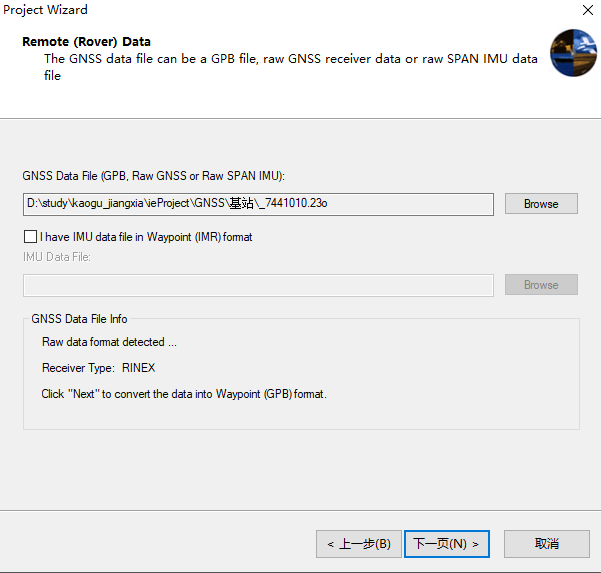
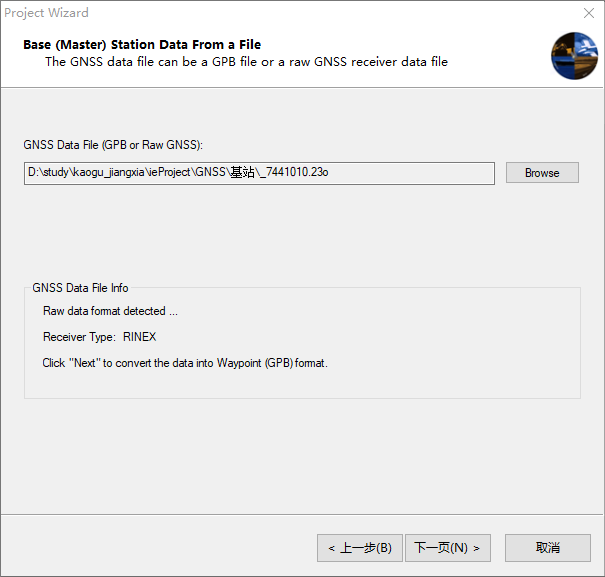
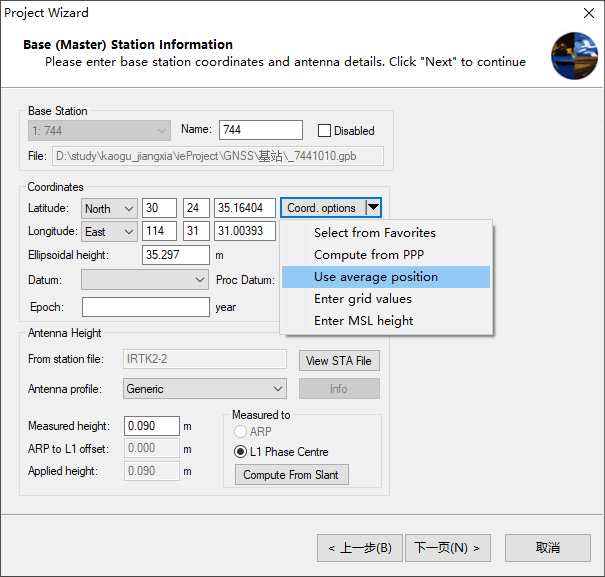
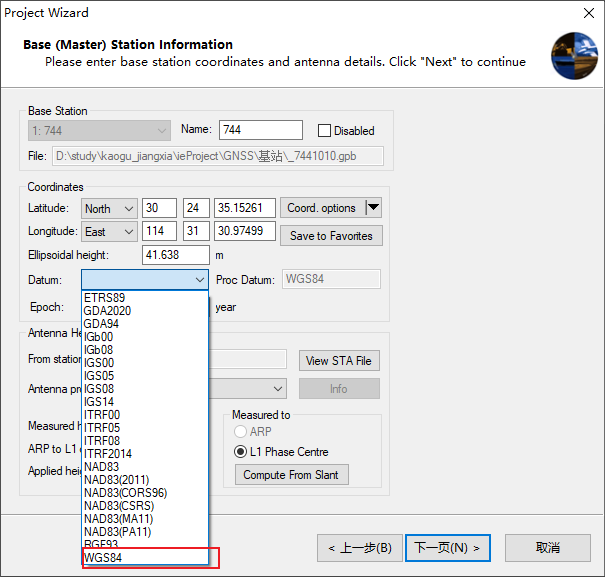
探地雷达使用过程中,有一个基站RTK、一个绑定在探地雷达上的移动站RTK
由于要用基站RTK去纠正移动站RTK,因此移动站RTK的数据采集时间应当在基站RTK采集时间包含中
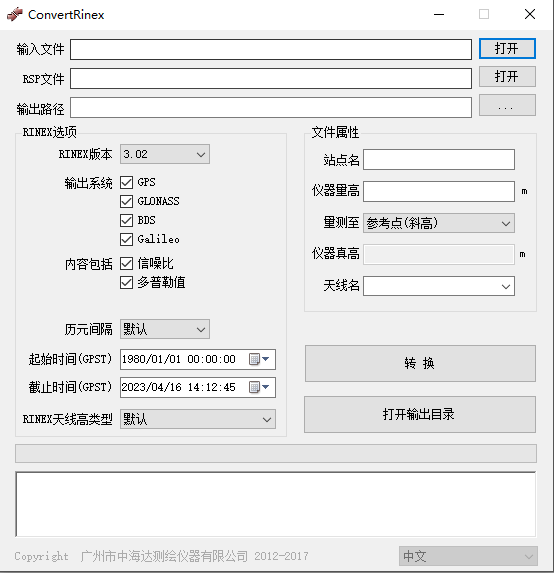
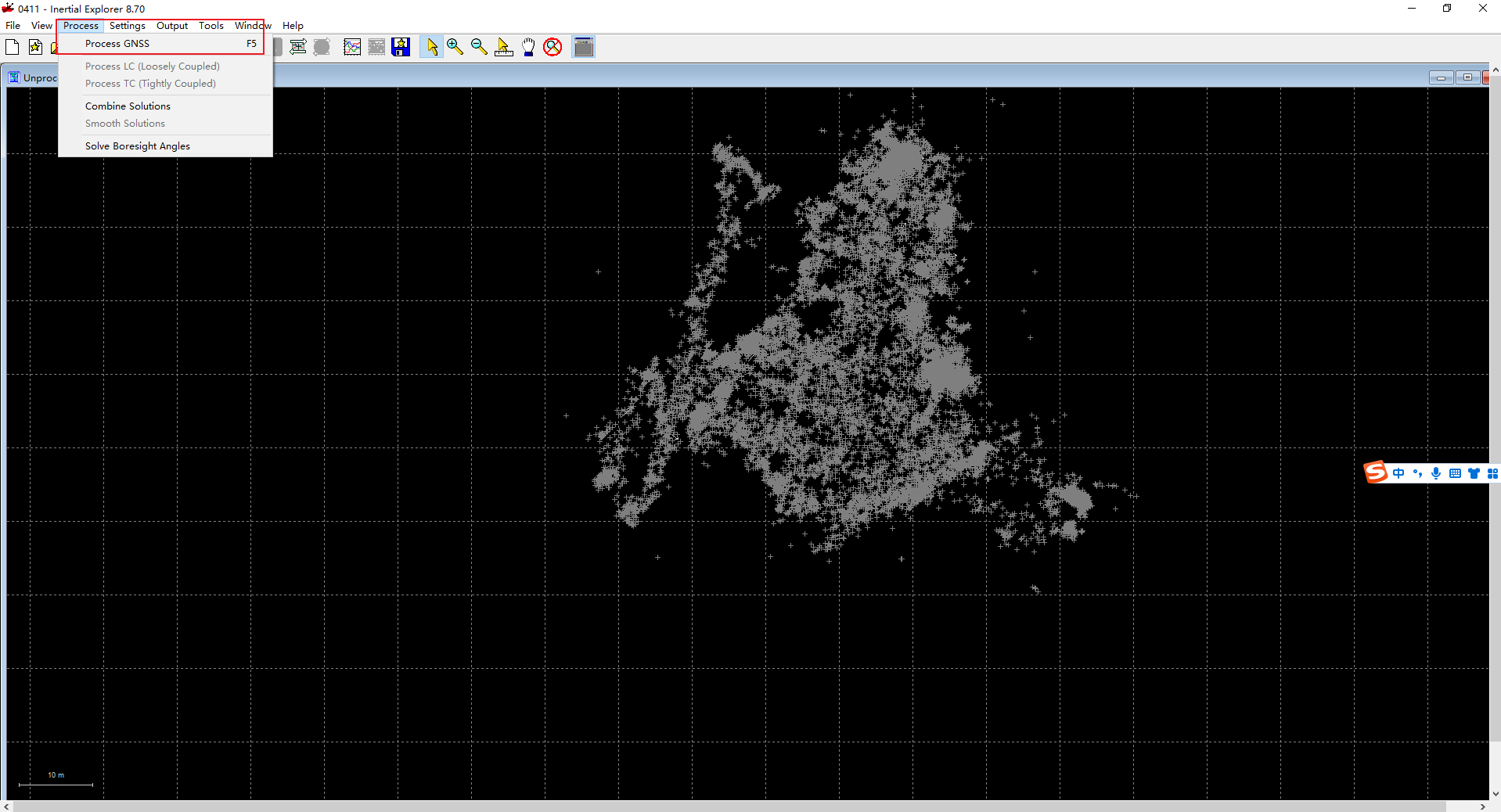
对RTK的数据.GNS文件的处理:使用HGO数据处理软件
HGO软件中:工具→RINEX转换工具
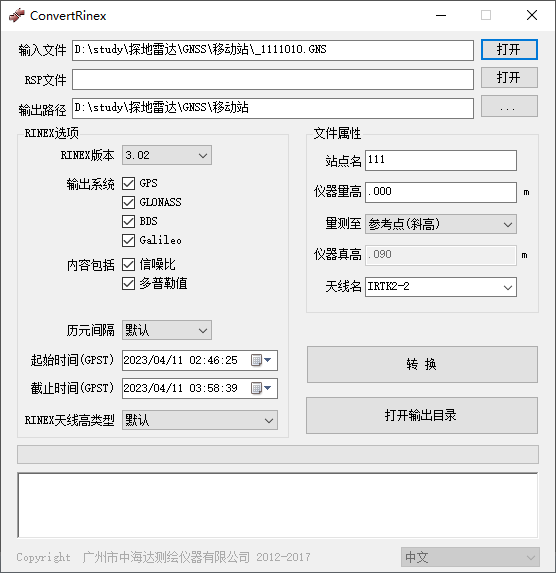
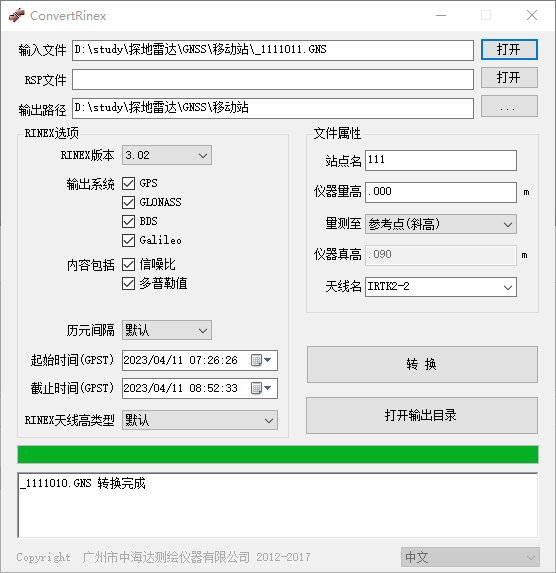
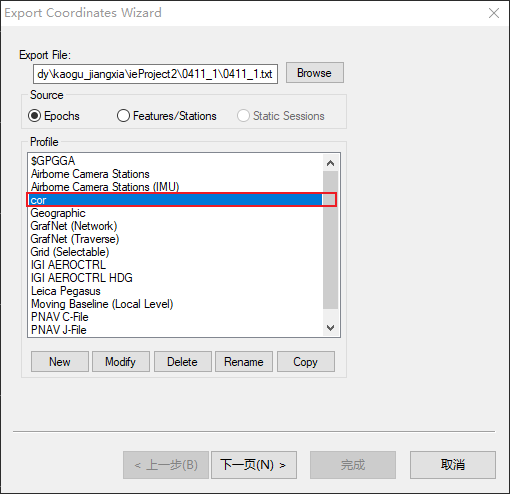
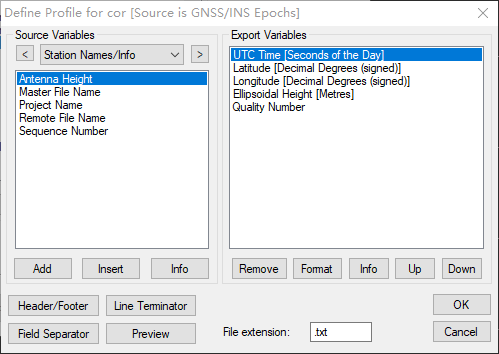
注意选择导出文件格式,这里可以选择cor,如果没有用new添加,格式如图所示,可以点击预览如图所示——然后一直下一步
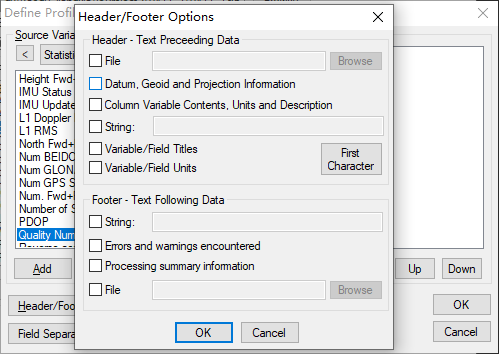
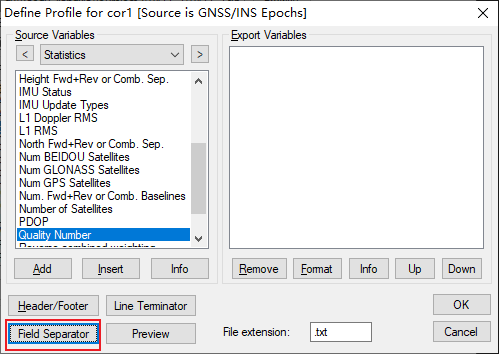
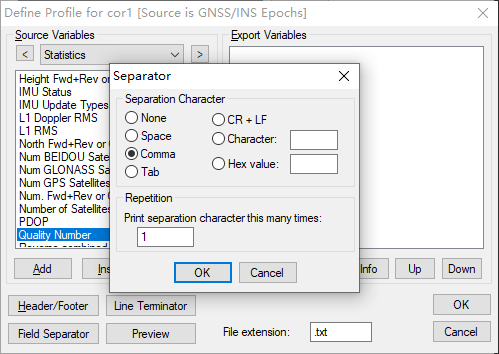
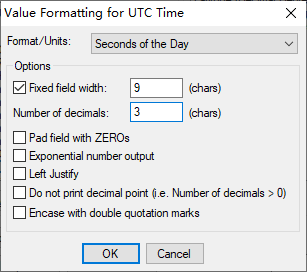
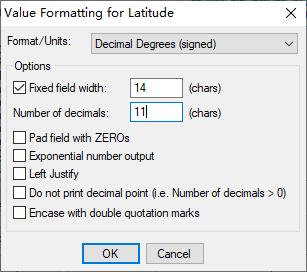
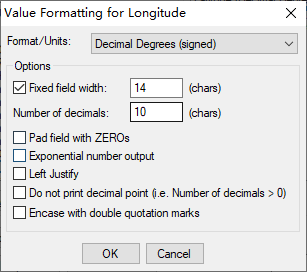
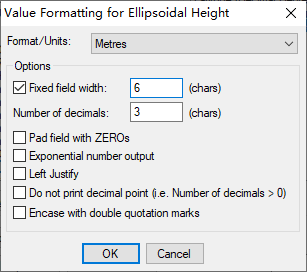
cor的配置
Header/Footer Options参数设置
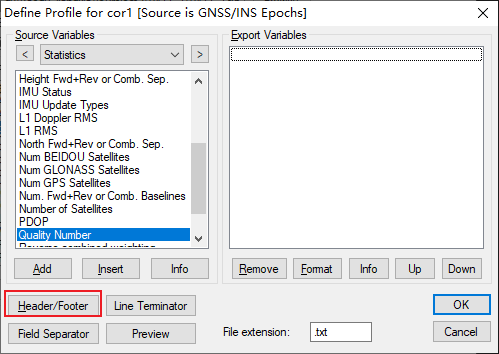
Field Separator参数设置
Export Variables内各项参数设置
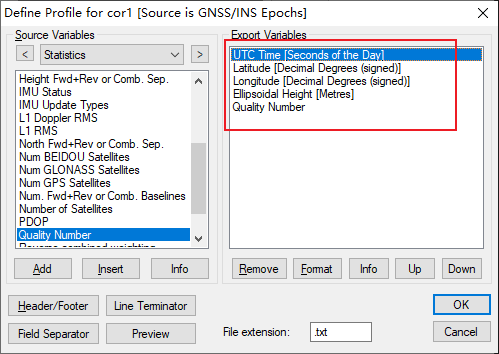
具体参数如下图所示:
1 | timeFilePath = 'GPR/2023041102line_time' |
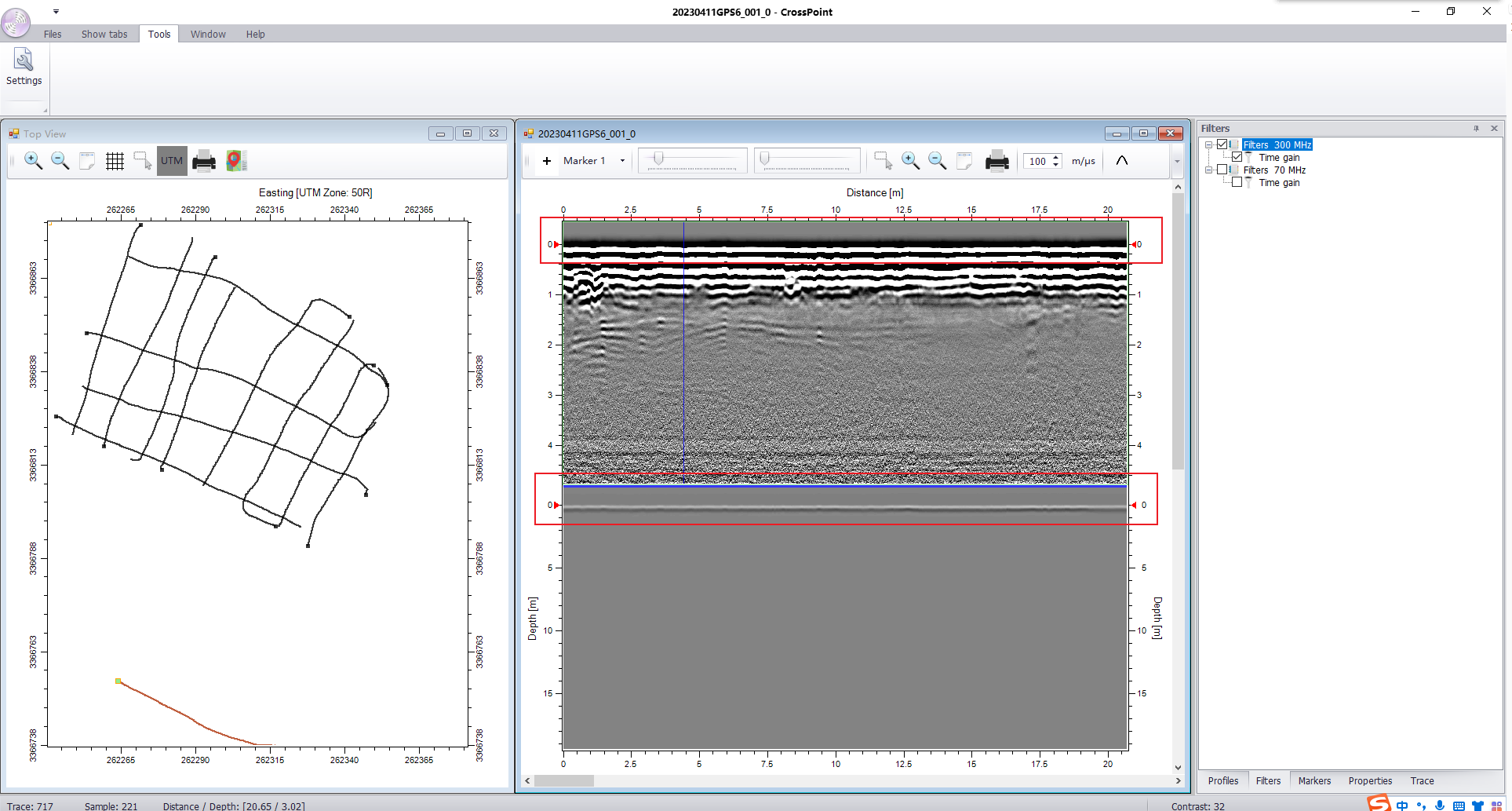
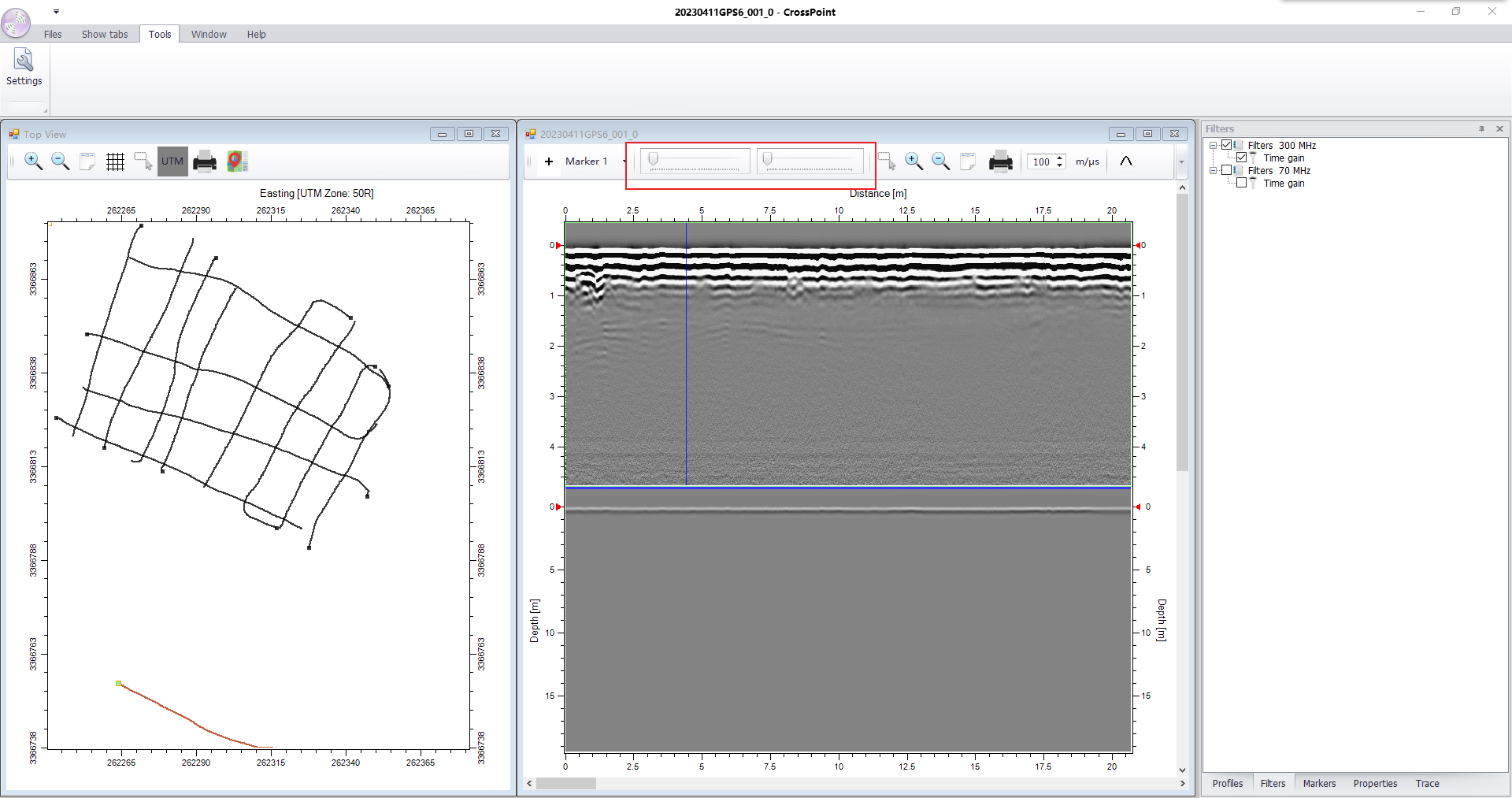
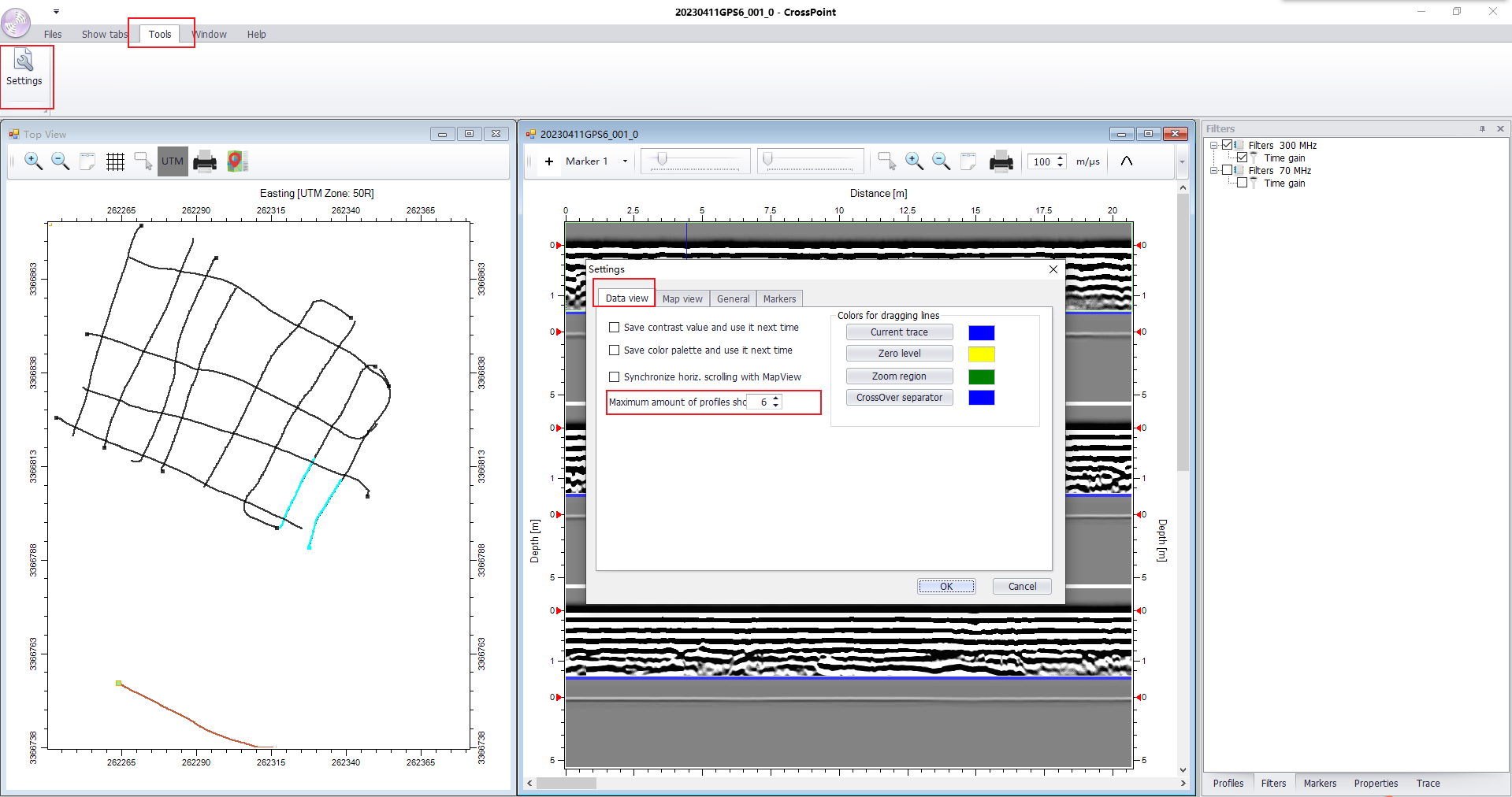
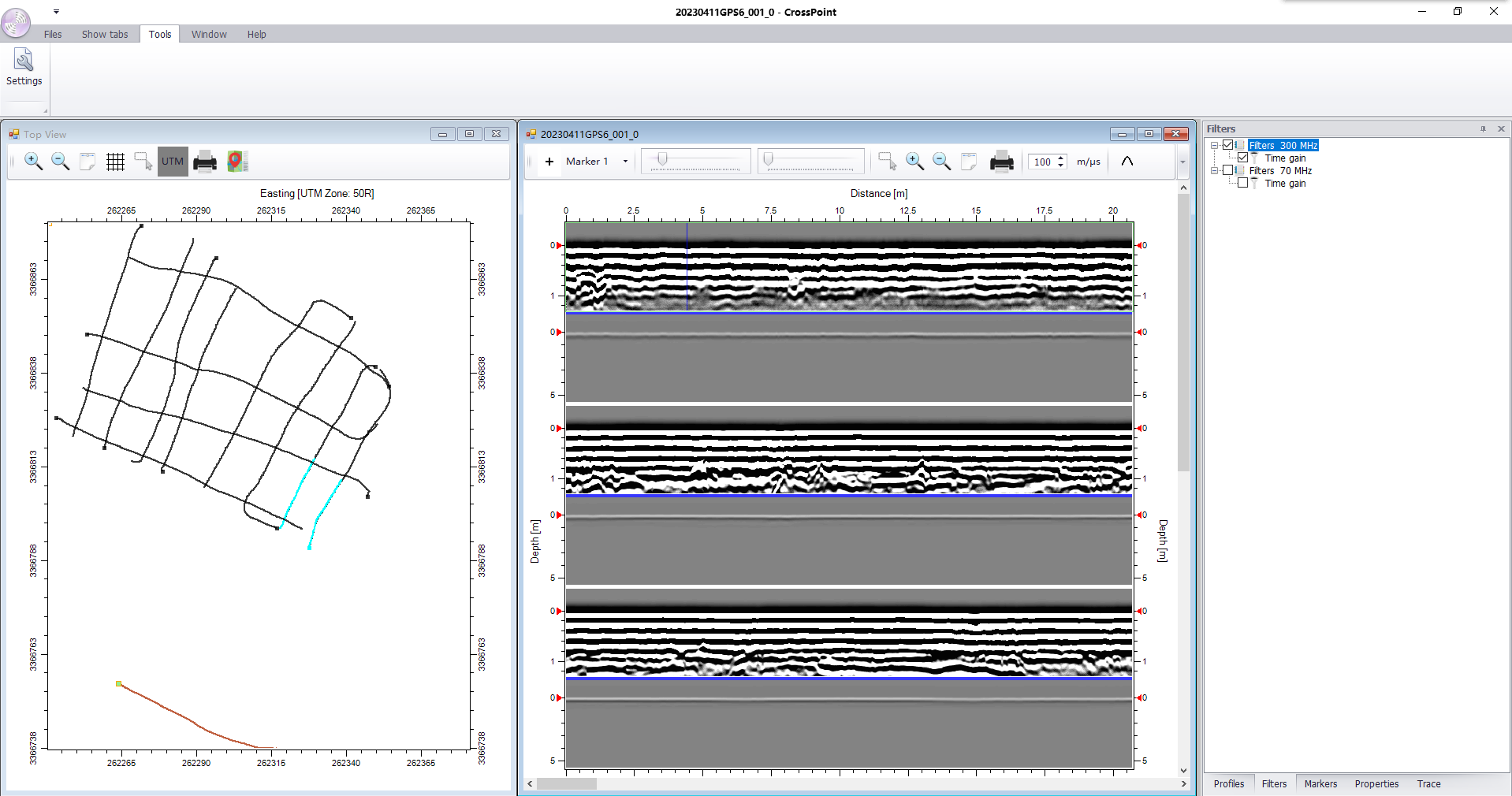
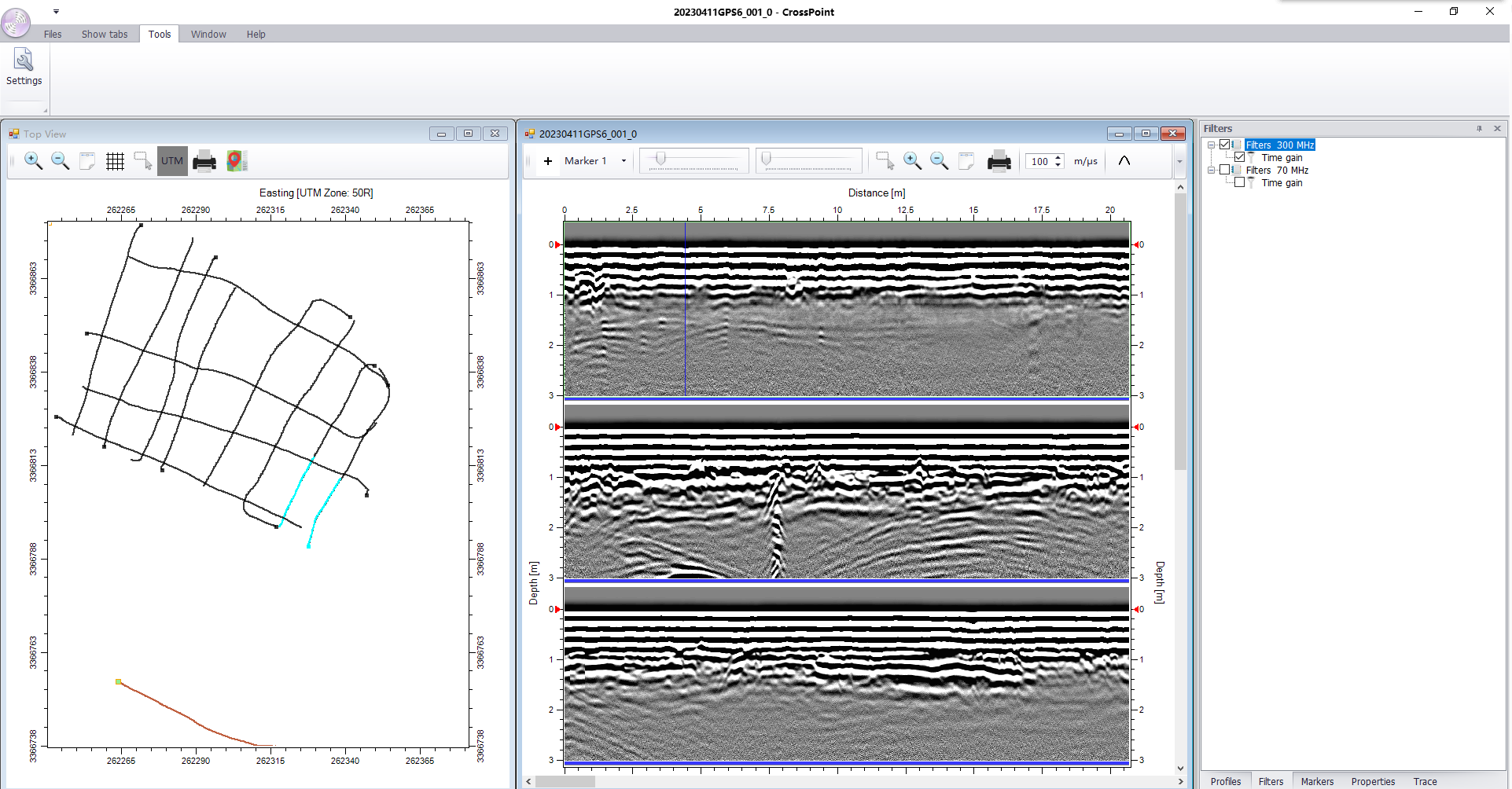
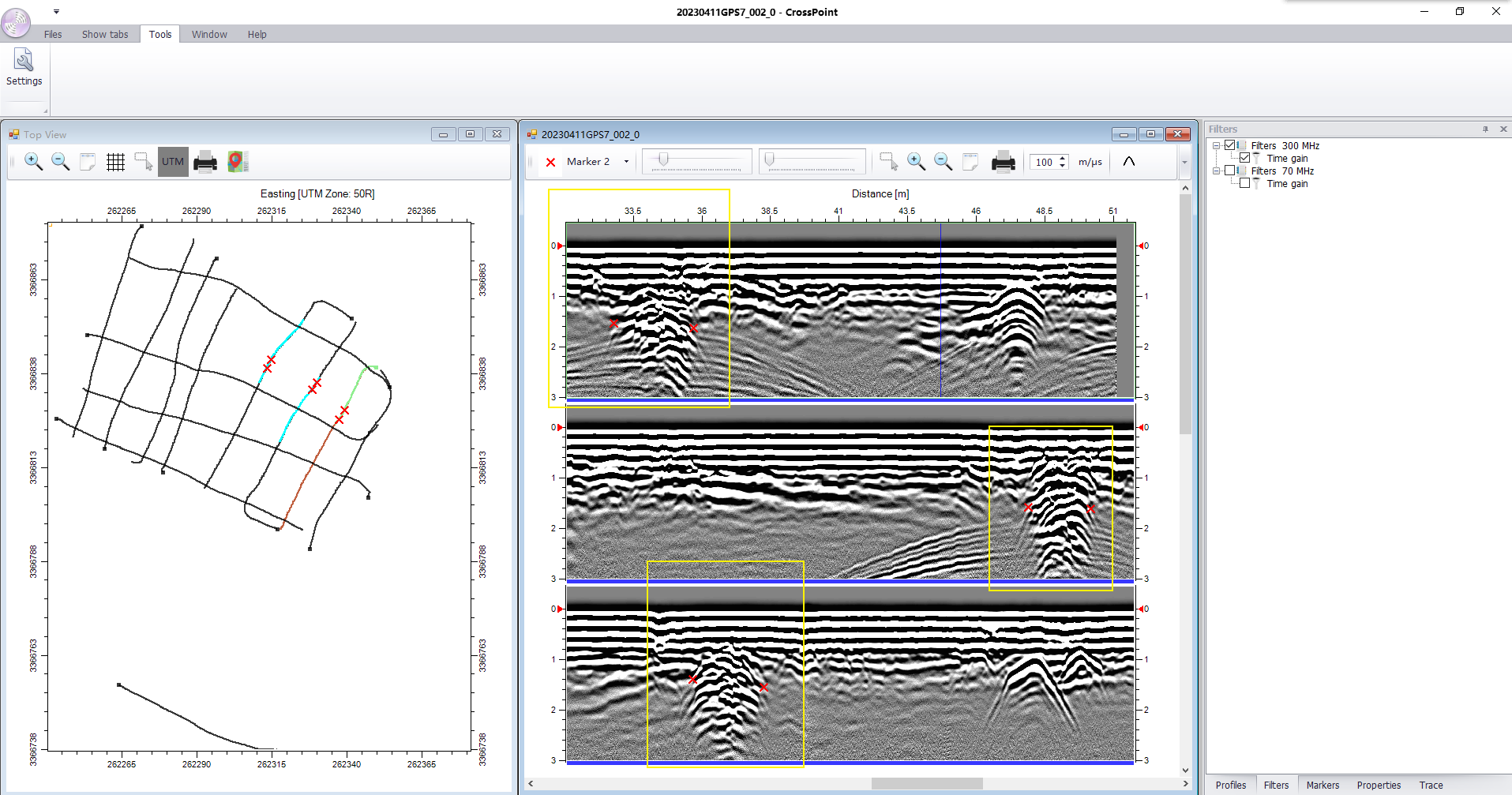
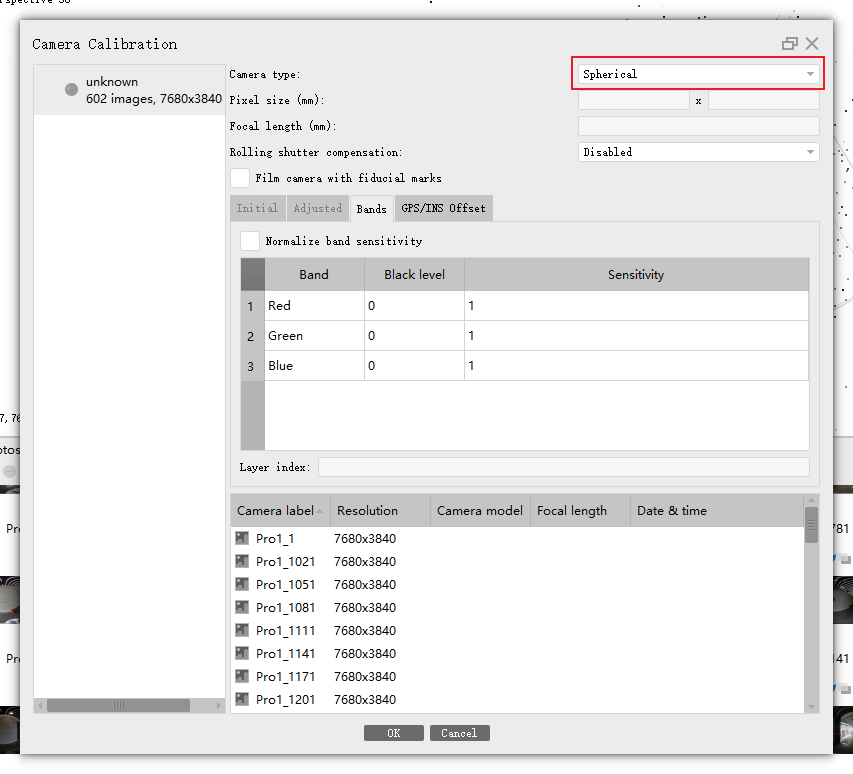
打开CrossPoint
打开同一个项目中的各项文件
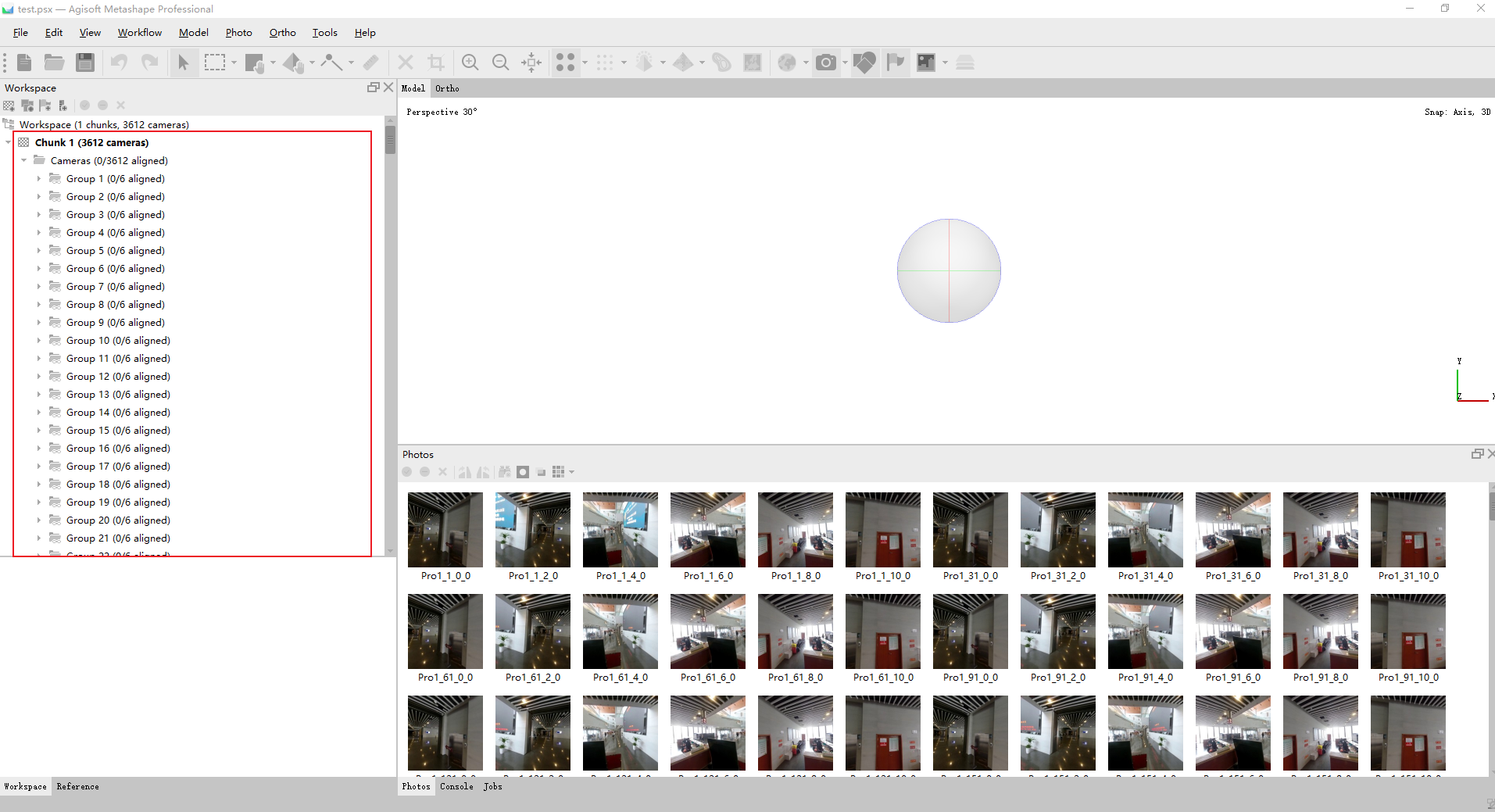
全景图片一张可以投影为若干张普通图片,在PhotoScan中可以将一张全景图片所投影出的图片设置为一个组,对其加以约束,会使得图片对齐效果更好
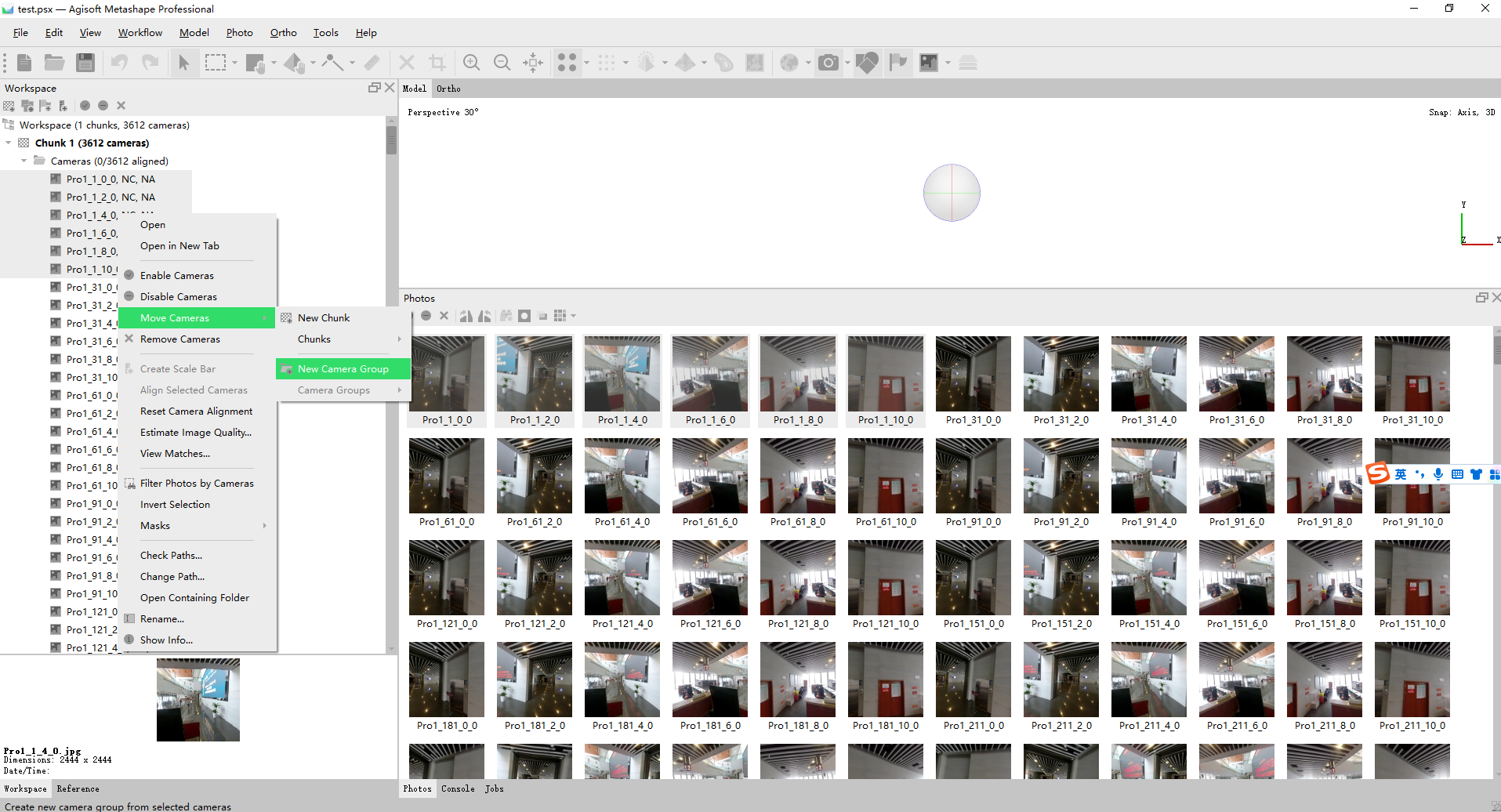
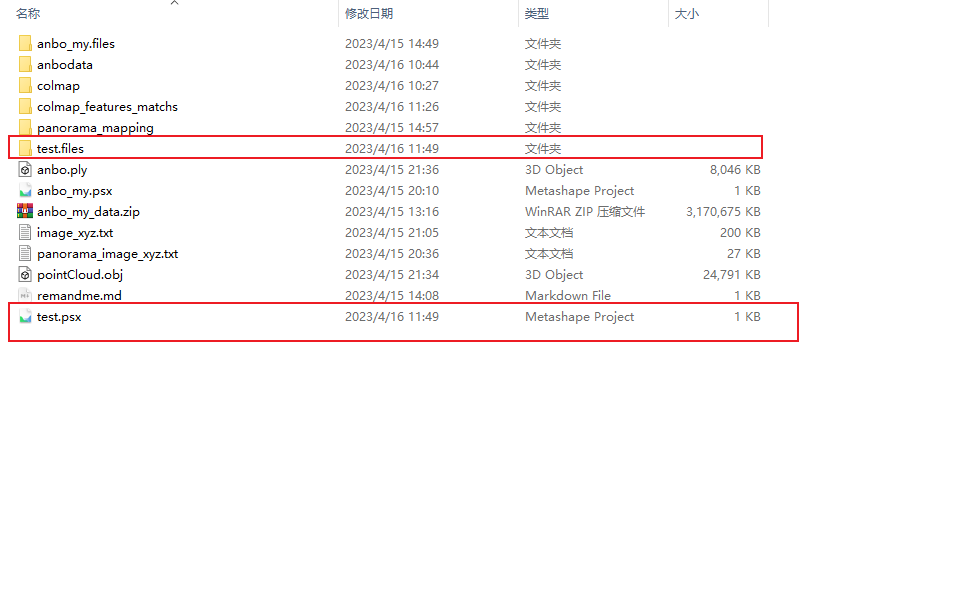
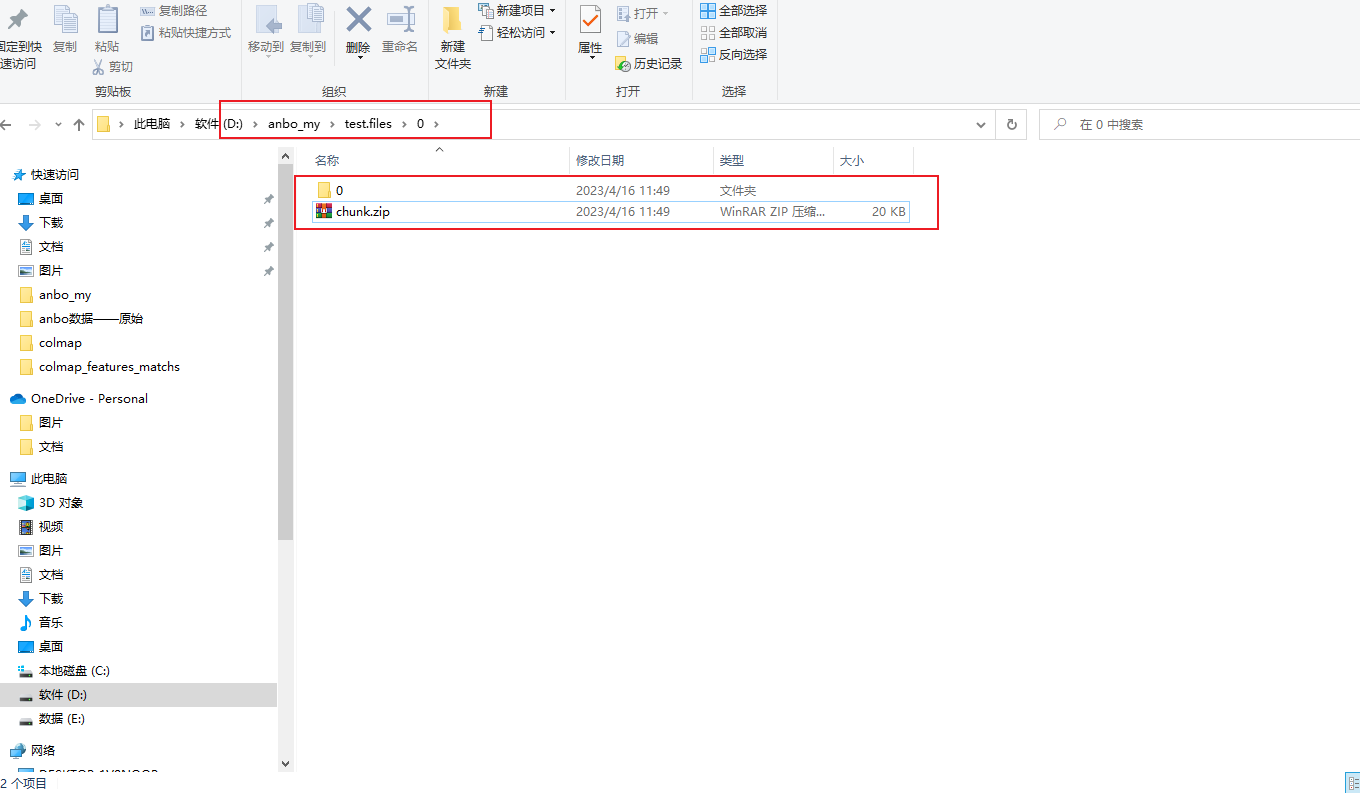
进入对应的chunk文件夹下
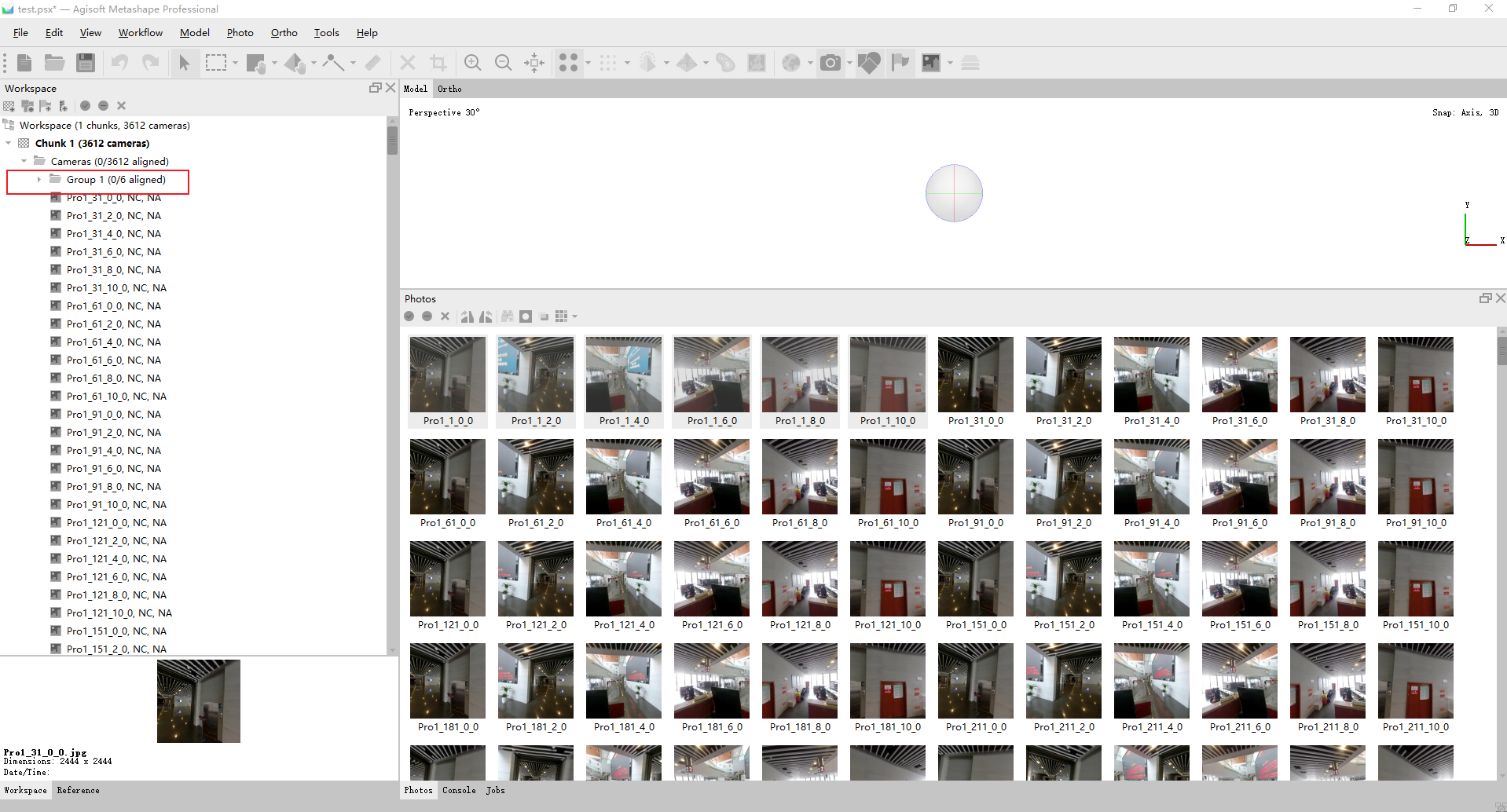
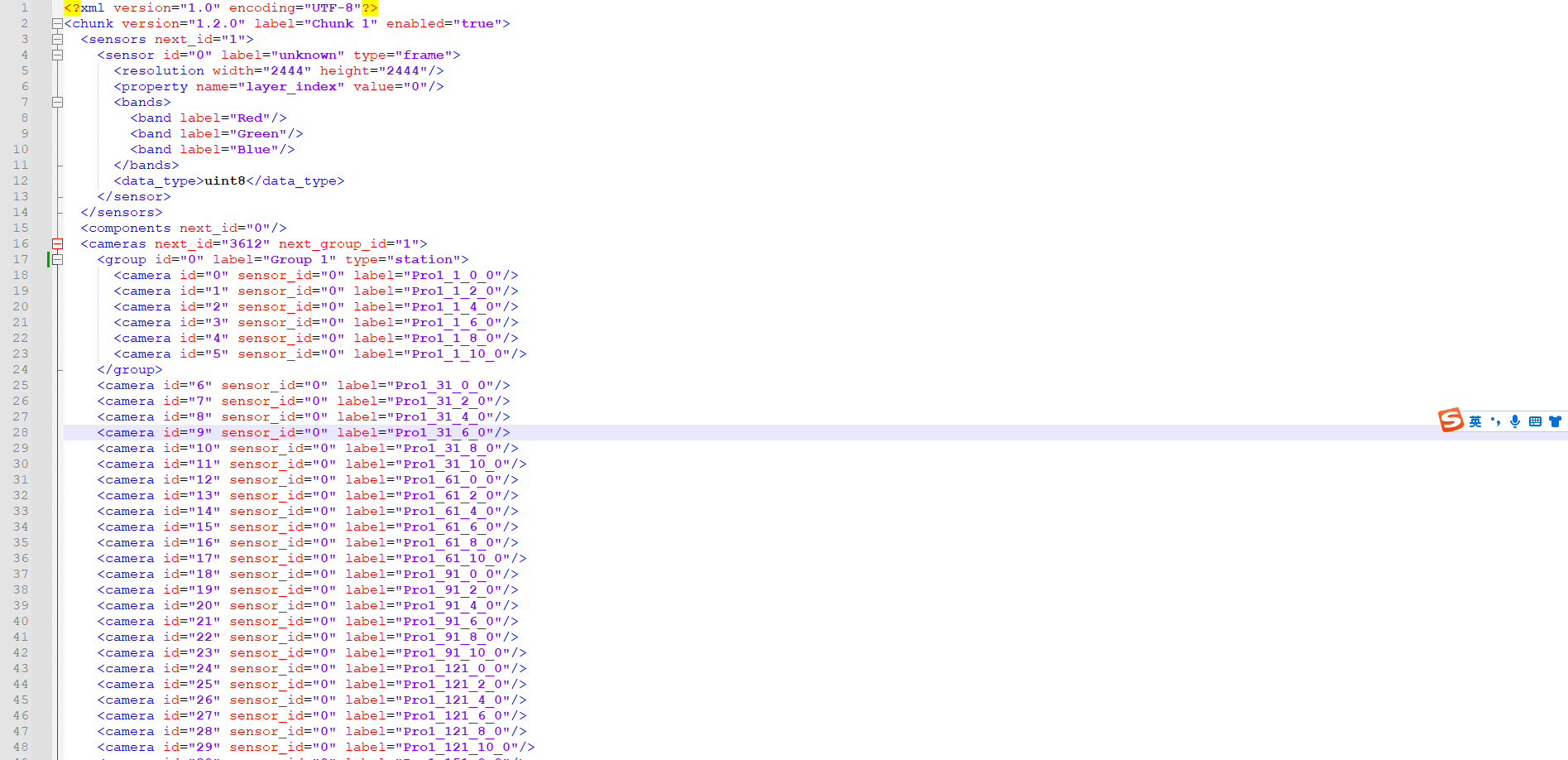
doc.xml内容如图所示,其中包含了我们预设的group,我们只需要将其他camera也组织成group格式就可以分组成功
1 | def photoScanNewChunk(): |
注意更改id、label和type的值

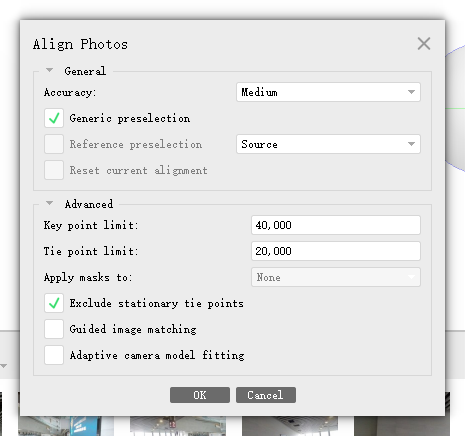
Workflow→Align Photos
根据需求更改精度之类的东西
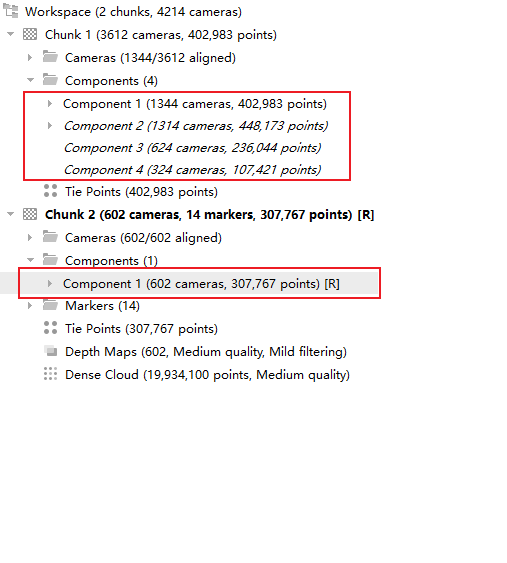
如果对齐成功,就会像下面一样只有一个component,而如果对齐失败就会出现多个component这时就需要其他方法去改进优化
除了按上述将投影后的图片进行对齐及后续处理,还可以直接使用全景图片进行操作
全景图片数量更少(一张全景图片会投影为若干张普通图片),因此处理速率更快
出现多个component的概率更小
但可能也会出现其他问题
由于是全景图片,因此不存在分group的情况,当然也可以将比较靠近的若干图片分为一组
注意导入图片后要有一个步骤告诉软件我们正在使用全景图片
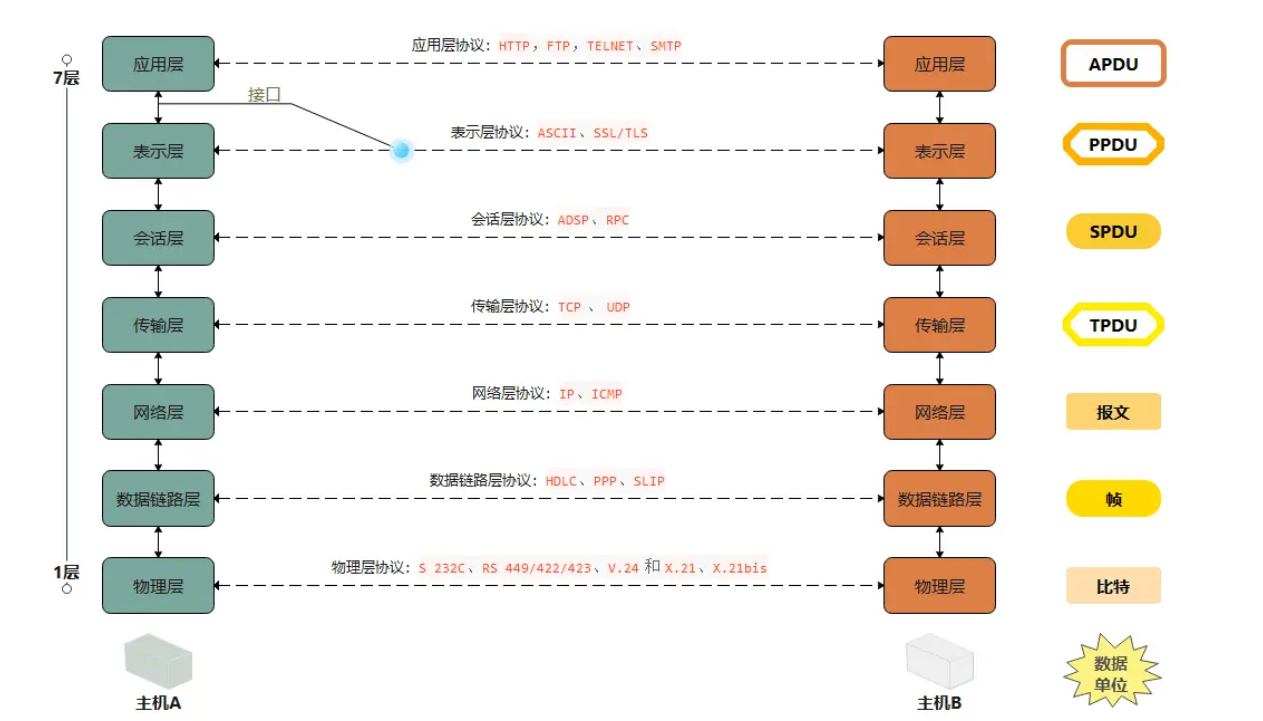
物理层所传数据单位为比特。要求发送法发送1/0时,接受方应当准确接受到1/0。因此物理层要考虑用多大的电压代表1或0,以及接受方如何识别出发送法发送的比特。
物理层的作用正是要尽可能的屏蔽掉多种多样的传输媒体和通信手段的差异,使物理层上面的数据链路层感觉不到这些差异。
信道:向某一个方向传送信息的媒体。单工通信、半双工通信、全双工通信
两台主机之间的数据传输,总是在一段一段的链路上完成的,这就需要专门的链路层协议。在两个相邻节点之间传输数据时,数据链路层将网络层交下来的IP数据报组装成帧,两个相邻节点在链路中传送帧。
每一帧会包括必要的控制信息:同步信息、地址信息、差错控制。